

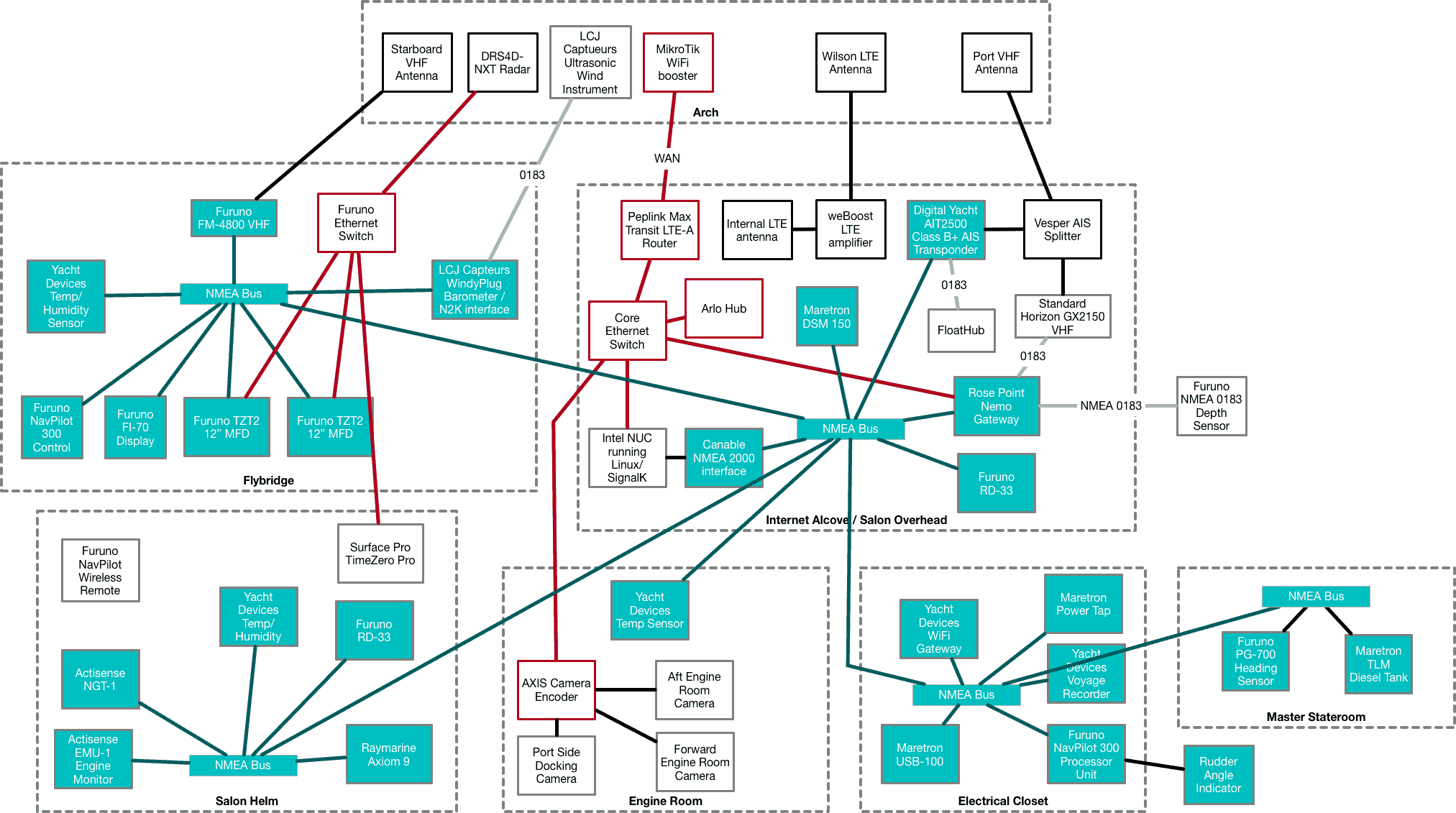
In the last 4 months, I have been developing my overall network on board Rendezvous. I wanted a good WiFi/Ethernet network to connect me to the outside world, as well as a well developed NMEA 2000 network for marine equipment while underway. So far, here’s what I have…
Goals
There were a number of goals with the network, but the key ones are:
- Navigation – provided by the Furuno & Raymarine MFDs, radar, autopilot, wind sensor
- Communication – VHF radios, AIS transponder, Internet connectivity
- Visibility & Monitoring – Maretron & Furuno displays, SignalK and Yacht Devices Gateways, Yacht Devices Voyage Recorder, Floathub, Actisense engine monitor, Yacht Devices temp sensors, AXIS camera system, Arlo cameras, tank sensor
- Internet & Connectivity – Peplink + weBoost amplifier, MikroTik WiFi extender
This is the first major revision of the networks, and it will definitely continue to grow and evolve as I test and work with newer equipment, and expand areas that I am interested in covering.
All of this equipment is new to Rendezvous in the last 4 months with the exception of the two existing VHF antennas, depth/speed sensor, and the re-purposed Standard Horizon GX2150 VHF radio. I’ve been busy!
Electrical Closet
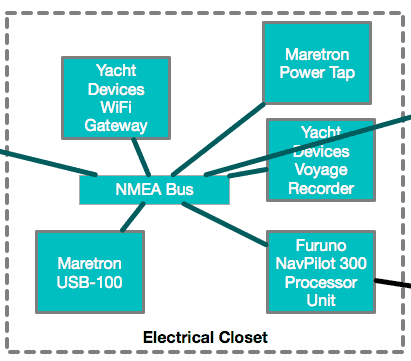
The network starts in the electrical closet, where power is provided to the NMEA 2000 bus from an always on circuit, and using a Maretron dual-sided power tee, with separate fuses for each side, planned for growth.
Also in the closet is the NMEA 2000 main bus, which has connections out to the salon driving area, Internet Alcove, master stateroom and engine room.
On the NMEA 2000 bus in the electrical room are several products from Yacht Devices including the Voyage Recorder and WiFi Gateway. In addition, the Furuno NavPilot 300 main processor unit is here, with connections to the bus as well as to the rudder angle indicator in the stern of the boat and the hydraulic autopilot pump.
Internet Alcove
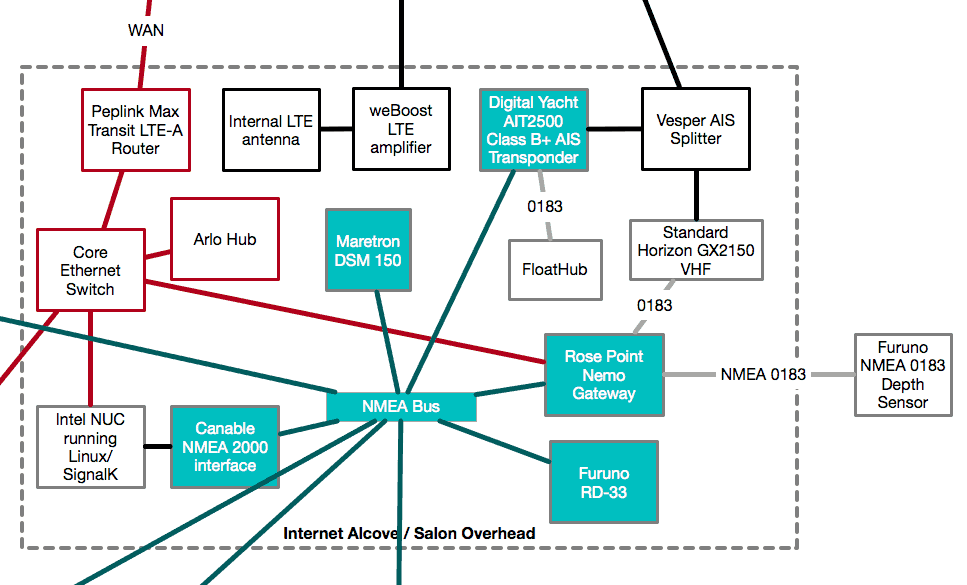
This location has the highest quantity of interconnections and important devices. It has pathways to the flybridge, and onward to the arch, as well as down to the salon driving station and electrical closet, so it is a key stopping point and pass through for many things.
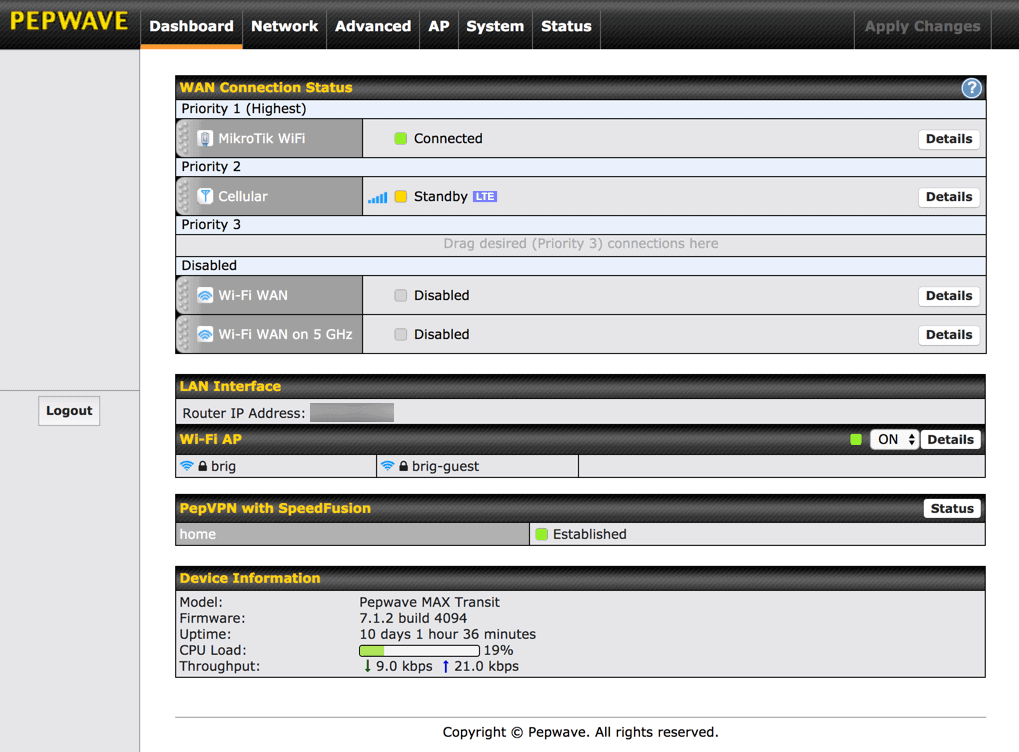
Inside the alcove is the core of the WiFi/Ethernet network for the boat. It starts with the Peplink MAX Transit router, which creates my local WiFi networks, connects via Ethernet to the Core Ethernet Switch, and grabs Internet connectivity either through one of it’s dual SIM slots using T-Mobile or Verizon, or via a cabled connection to the MikroTik Groove mounted on the arch. The switch is a TRENDnet industrial switch that runs off of DC power, and everything is connected to the always-on dedicated circuit distribution in this area. I am using this switch instead of the StarTech managed switch I’ve used previously only because they no longer seem to be producing it.
The LTE signals for the Peplink are amplified by a weBoost amplifier and antenna positioned near the router. A cable from the amplifier runs up through the flybridge and to the top of the arch where a dedicated Wilson LTE marine-grade antenna sits to grab the LTE signals.
Connected to the LAN network is an Intel NUC computer running Ubuntu 18.04 LTS which is connected to the NMEA 2000 network via a canable interface. I run SignalK on this system which uses the N2K interface to grab all of the data on the bus, and allows me to use web-based dashboards like InstrumentPanel, or iOS apps on my phone and tablet like WilhelmSK. I am also using Grafana+InfluxDB to log a lot of the data from SignalK so I can see trends – tanks, wind speeds, temperatures, etc.
In addition, this server runs aisdispatcher and is a mobile AIS transmission station for a number of online services including MarineTraffic. The AIS data comes from the AIS transponder, and when on, the two VHF radios, both of which send any data they see to the bus.
The Arlo camera hub is also in the alcove, connected to the LAN, and powered by the same always on circuitry.
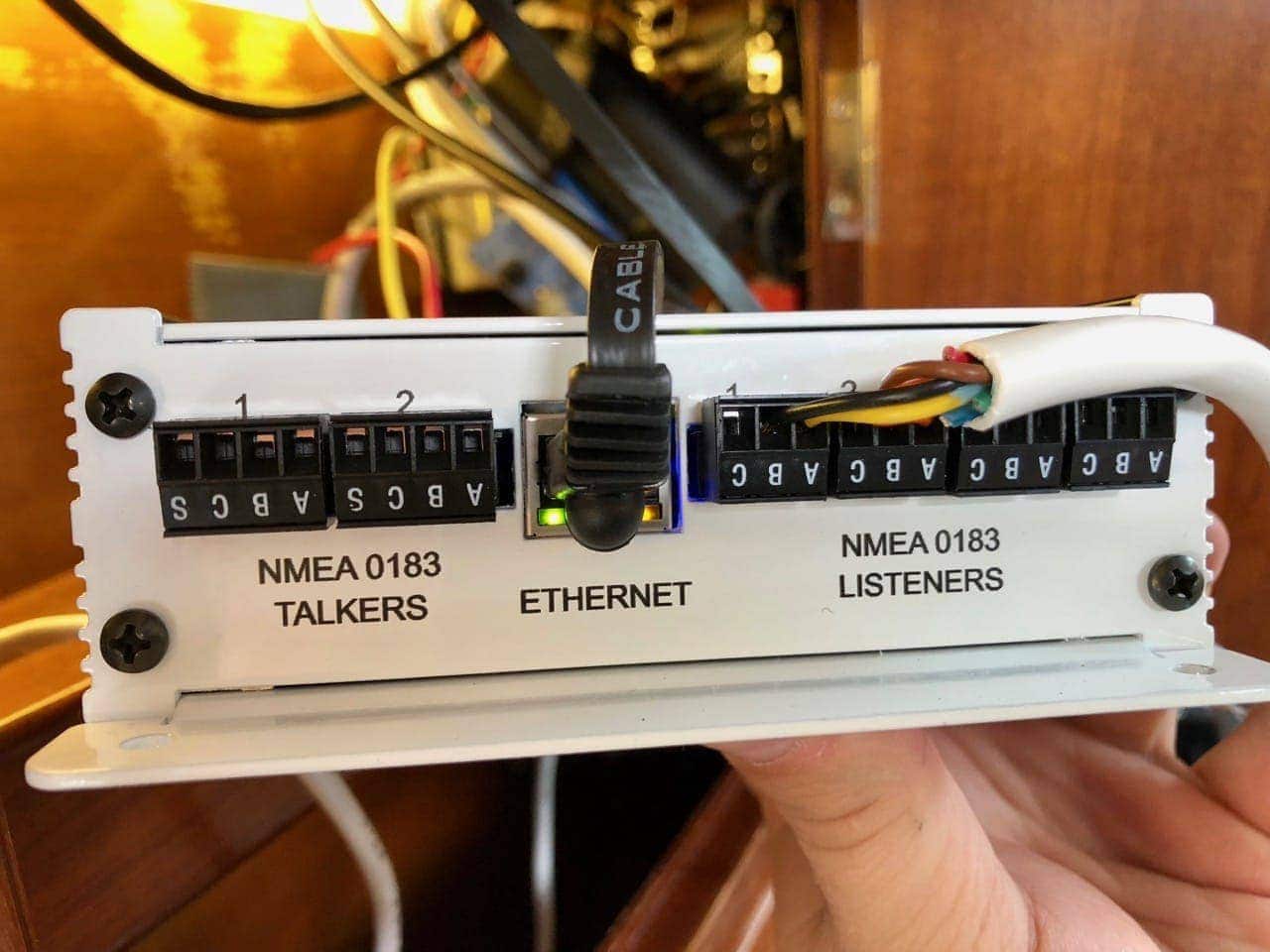
The Rose Point Nemo gateway is in the alcove as well, and has a number of things connected to it. Most importantly, I have a legacy NMEA 0183 depth / speed sensor that is connected directly to the Nemo. It converts that to NMEA 2000 so all other devices on the boat can consume depth and speed through water. I would like to replace this with a NMEA 2000 sensor that might also include water temperature, but I haven’t gotten around to it. The cable run is also not an easy one…
In addition, the Nemo gateway provides GPS, SOG, COG, and other info to the Standard Horizon VHF, which is NMEA 0183 only. It also receives AIS targets from the Standard Horizon and puts those on the NMEA 2000 network as well.
Also in the alcove is a separate circuit for VHF/communication devices. This powers the Vesper VHF splitter, Standard Horizon VHF, and Digital Yacht Class B+ AIS transponder.

On the outside of the alcove there are a few instruments mounted for ease of use while in the salon area, and at the driving station. They include a Maretron DSM 150 display, Furuno RD-33 display, and a Standard Horizon GX2150 VHF. The Maretron and Furuno are connected to the NMEA 2000 bus, while the Standard Horizon VHF uses NMEA 0183 to the Rose Point Nemo gateway. The Maretron DSM is kept on 24×7 and faces out into the salon area so as you’re walking by or enjoying the views from the couch, you can still see critical info scrolling by.
There’s also room here for expansion next to the Maretron, and elsewhere along the upper section.
Salon Driving Station

This location has a bus drop hidden behind the engine gauges with the Actisense EMU-1 engine monitor connected. There’s also a connection the lower Furuno RD-33 display which is mounted at eye level and used for data that should always be easy to see.
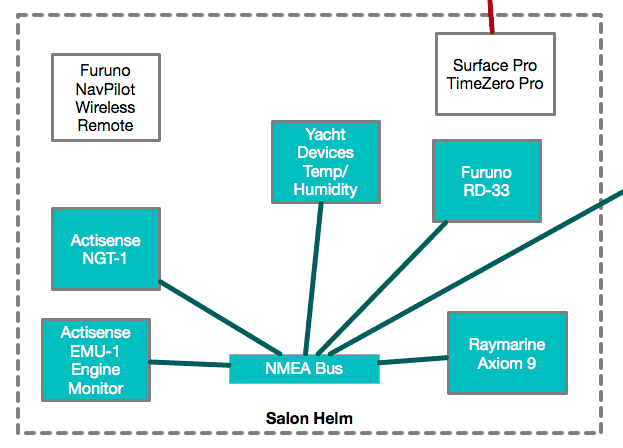
The Raymarine MFD is also mounted here, and although it is smaller, serves as a backup to the Furuno system in case of a major failure. I also use this MFD while at anchor to provide a good GPS signal, and provide an easy way to see location without running the more power-hungry Furuno system.
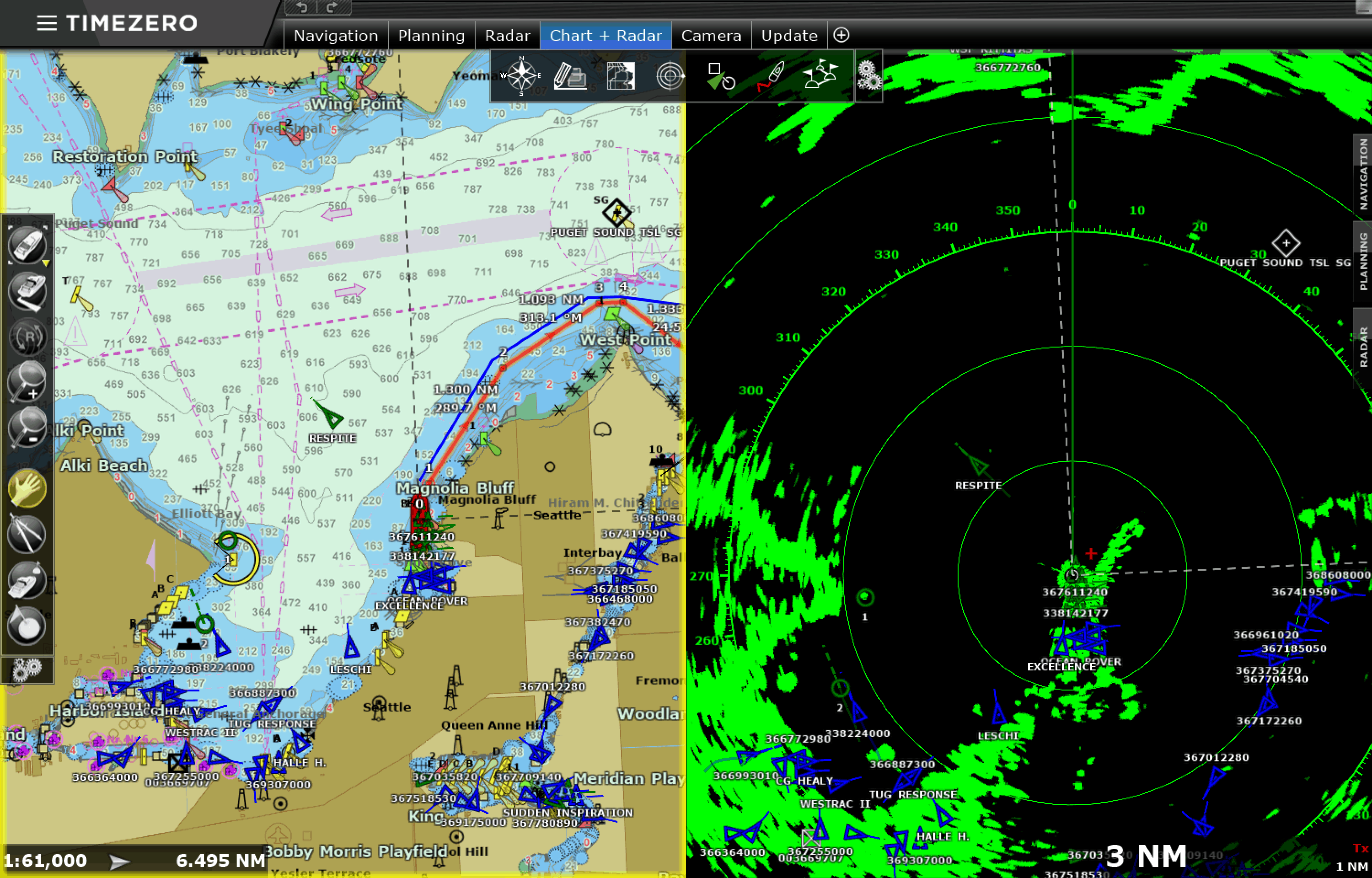
The biggest piece of equipment here is the Surface Book running TimeZero Professional. I used a RAM mount to install this, and usually only use the tablet portion of the Surface Book while underway. In addition, I am still using the AC-powered docking station that connects to the tablet part, which allows for a wired Ethernet connection to the Furuno Ethernet Switch in the flybridge, which allows TimeZero to control the radar, autopilot, cameras, and sync with the TZT2 MFDs.
I’m still investigating whether long-term a permanent monitor would be better suited than the Surface Book tablet, but it is very nice to have it be portable, so for planning, I can grab it and attach the keyboard, sit down at the dinette, and have a fully functioning laptop. This laptop also has a full copy of Coastal Explorer on it, and can use the Nemo Gateway very effectively as a backup PC navigation software and even control the Furuno autopilot.
I also have a wireless handheld remote for the Furuno NavPilot 300 system in case I choose to use the autopilot from this location.
Flybridge

This is my primary driving station, and as such, I spent more time making this a multi-purpose and comfortable place to be from a navigation and visibility perspective.
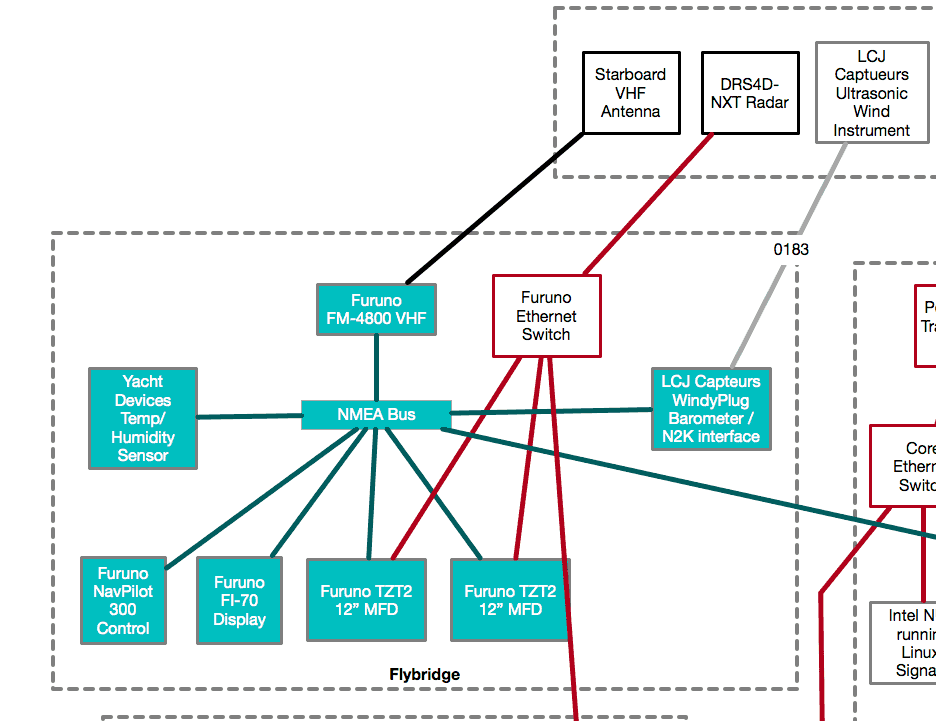
The primary part of the network here is the dual Furuno TZ-Touch 2 12″ MFDs which are connected both to the NMEA 2000 network and to the Furuno Ethernet Switch. They are the core of the navigation part of my network, and provide charts, radar, dashboards for engine and other, as well as cameras while docking and underway.
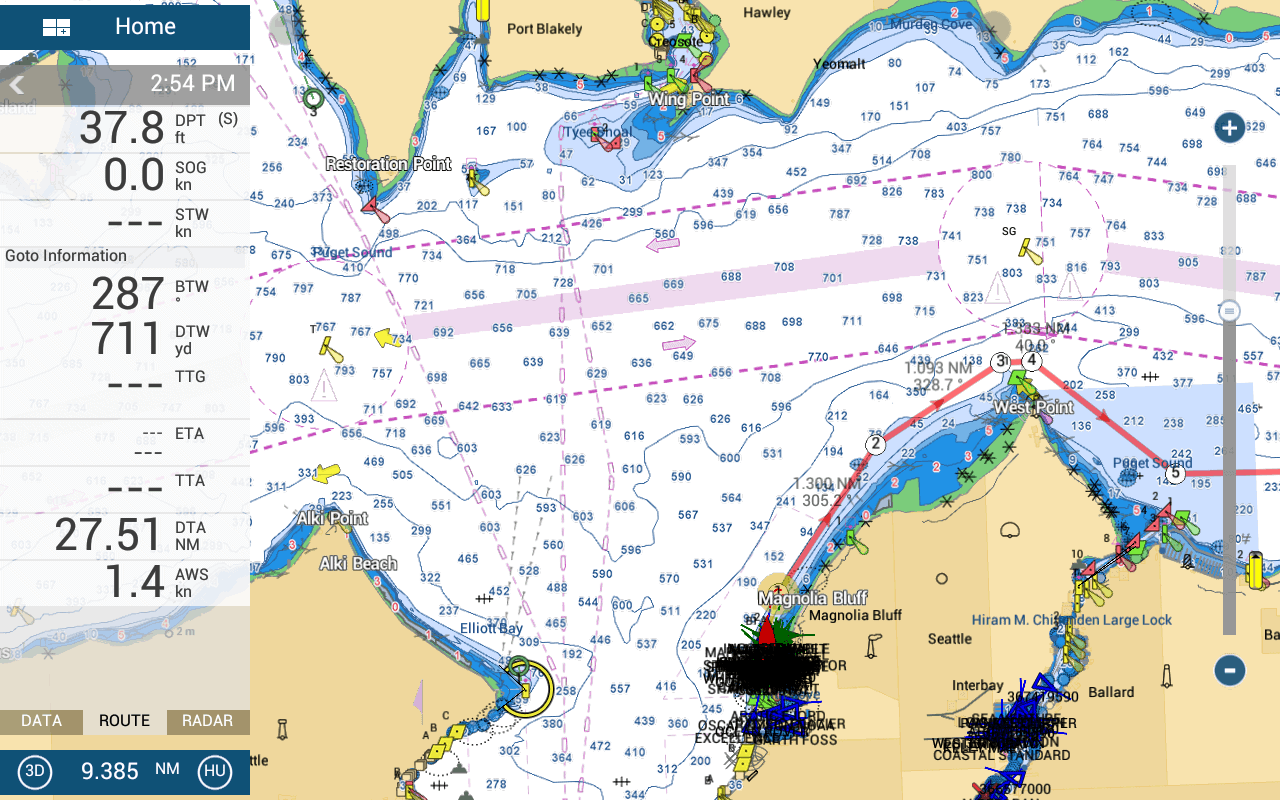
For charts, one TZT2 display is the master and also works in tandem with the TimeZero Professional copy running on the Surface Book at the salon driving station. I have C-MAP, Navionics, and US/Canadian Raster/Vector charts that I use at different times.
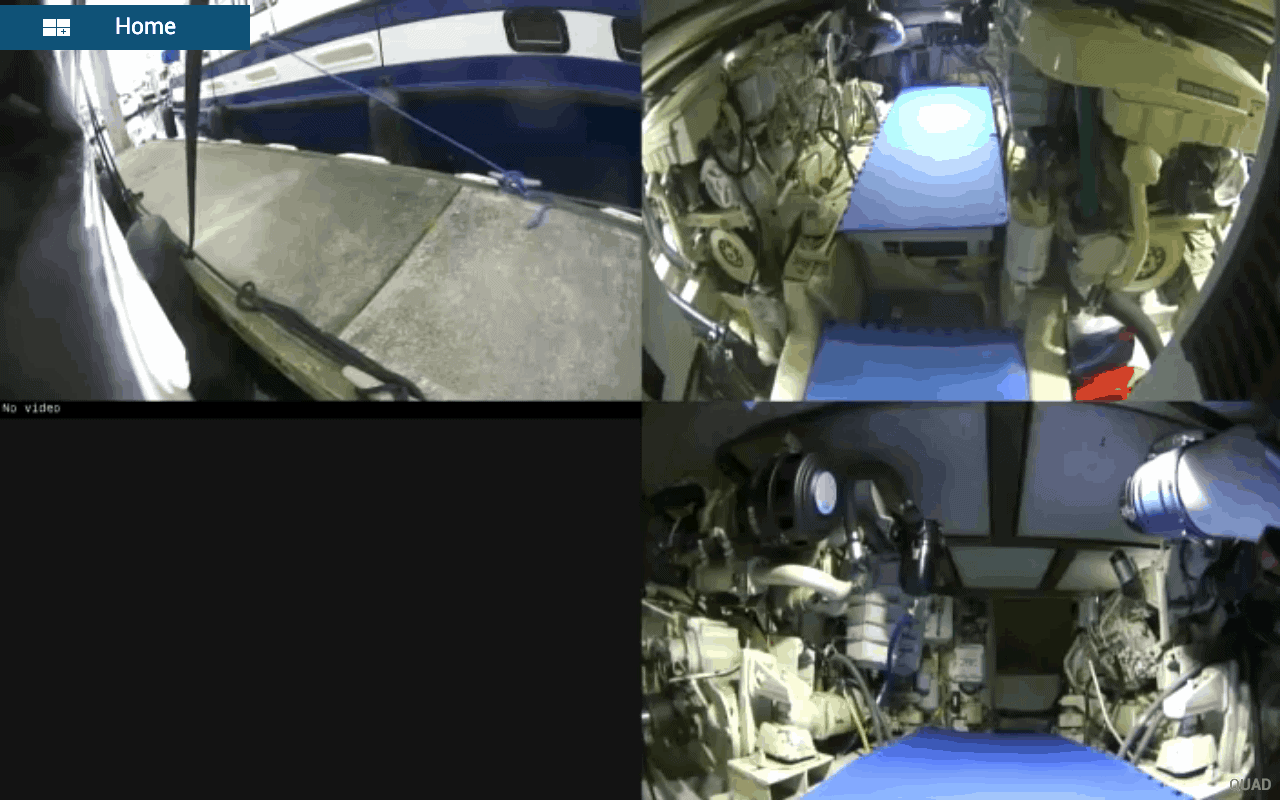
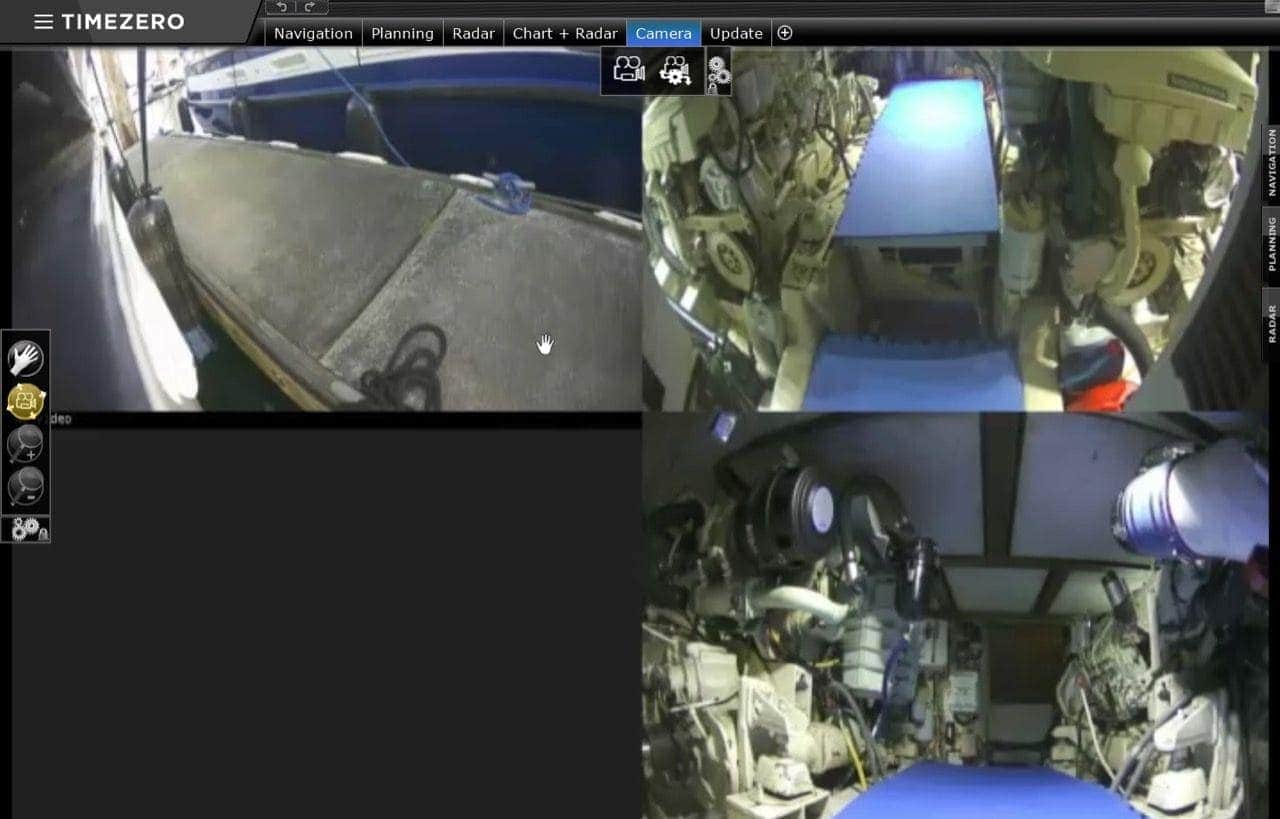
The cameras are mounted in the engine room and on the port side of the boat, and are connected to a single AXIS camera server in the engine room. It has an Ethernet connection up to the Furuno Ethernet Switch, and the MFDs can display all cameras at once, or individual ones depending on your choice. I use the port side camera while docking, and the engine room cameras while underway.
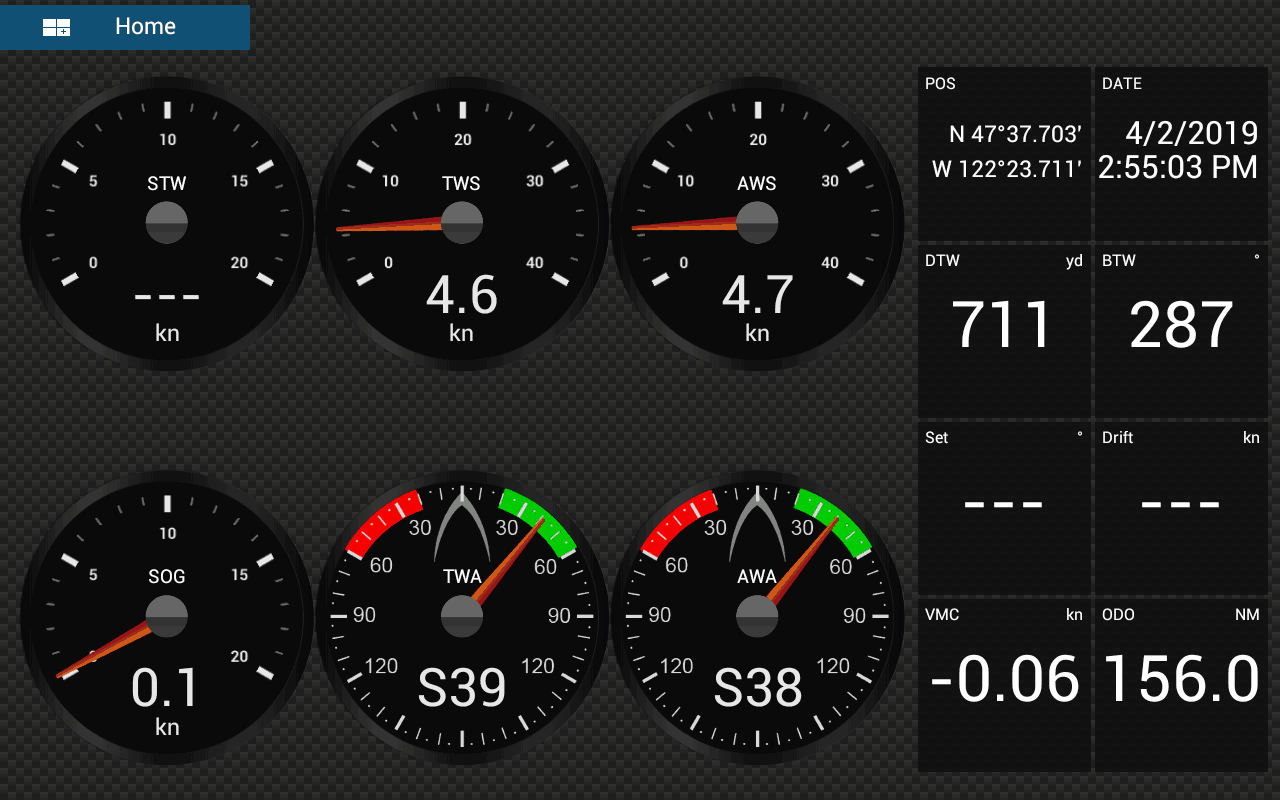
The dashboard feature within the TZT2’s is one of, if not the best, I’ve ever seen on an MFD. I don’t know why more people don’t talk about this, but I’ve already configured a dual engine page (mostly factory options with some tweaks) and a docking screen that shows speeds and wind and directions along with drift for help while docking. Almost all of this data comes from NMEA 2000.
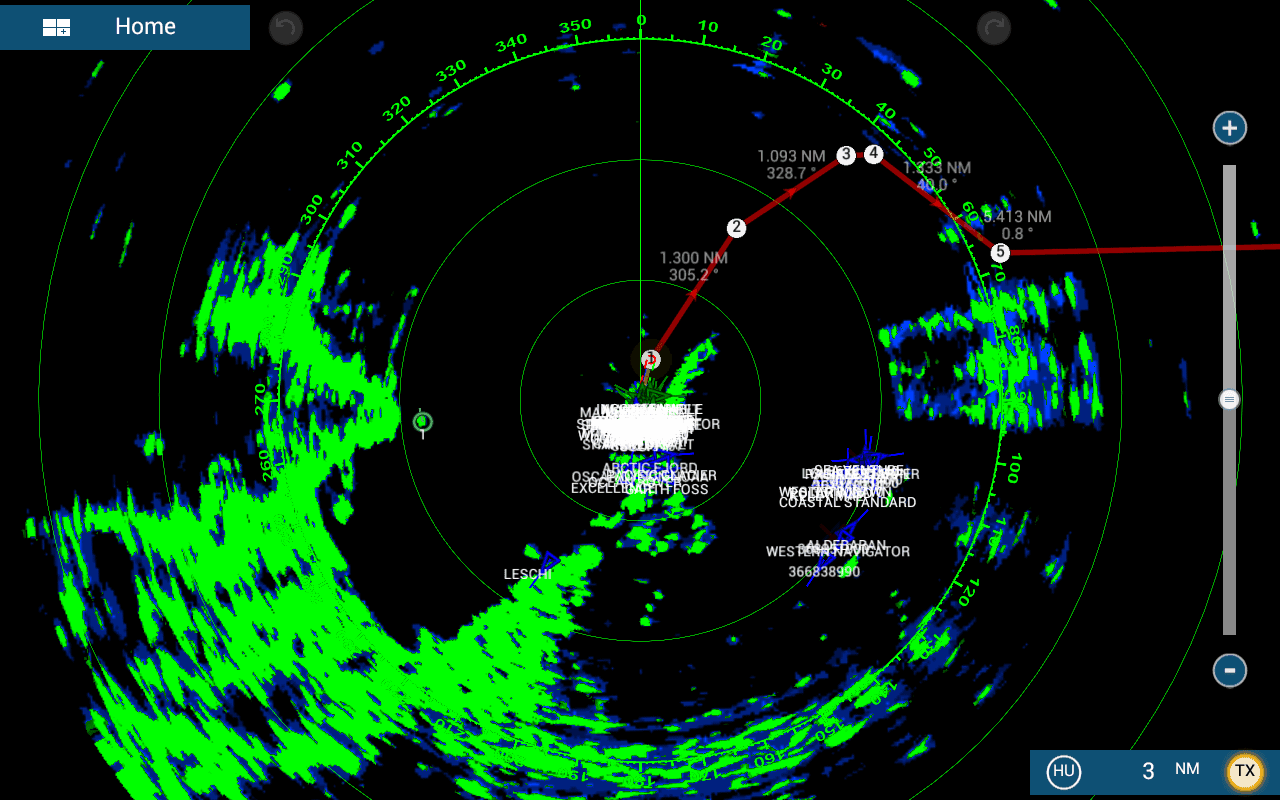
Of course, one of the main reasons I put the TZT2’s in was the DRS4D-NXT doppler radar, which is amazing. The target analyzer feature in particular, which is using the doppler technology, is great as it identifies targets moving towards you at more than 3 knots, and tags them in color, as well as ARPA targets. These targets show up on the MFDs and the Surface Book/TimeZero down below. I have not investigated as to whether Furuno is sending out the correct PGNs for the ARPA targets to show up on other products like Coastal Explorer.
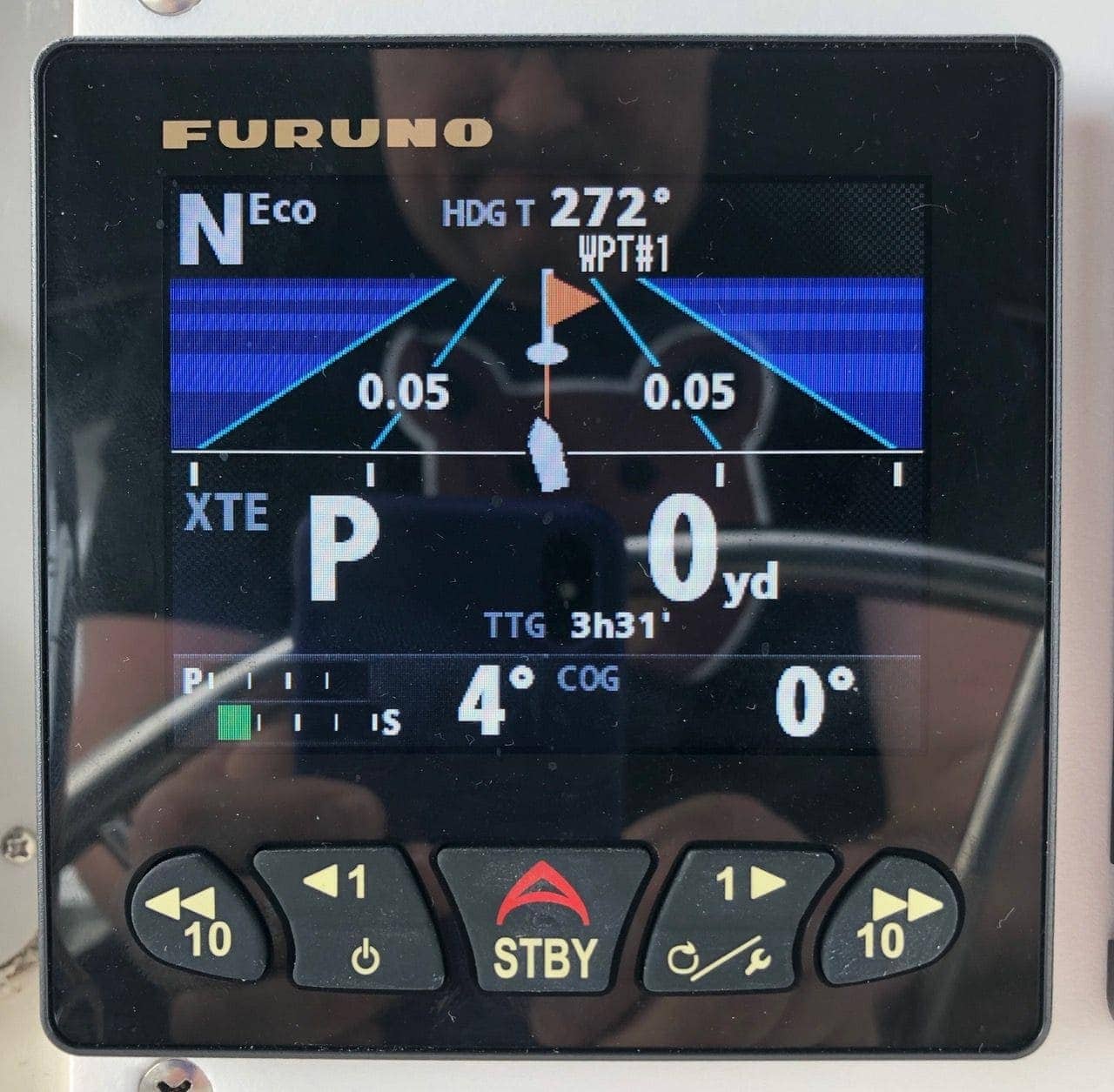
The Furuno NavPilot 300 control instrument is also here, and connected only to NMEA 2000 for power and control. It interfaces with the processor in the electrical closet.

There is also a Furuno FI-70 display in this location only, connected to NMEA 2000 for network and power. The flybridge station has a truncated version of the engine gauges available at the salon driving station. In addition, when the throttles and gear levers are engaged while underway, they block some of the gauges requiring you crane your neck or look underneath them to see RPMs and other things. The FI-70 has a fantastic single-screen, dual engine display that allows me to see everything very quickly from any chair position, as well as things like boost pressure and other data courtesy of the Actisense EMU-1 engine monitor I installed.
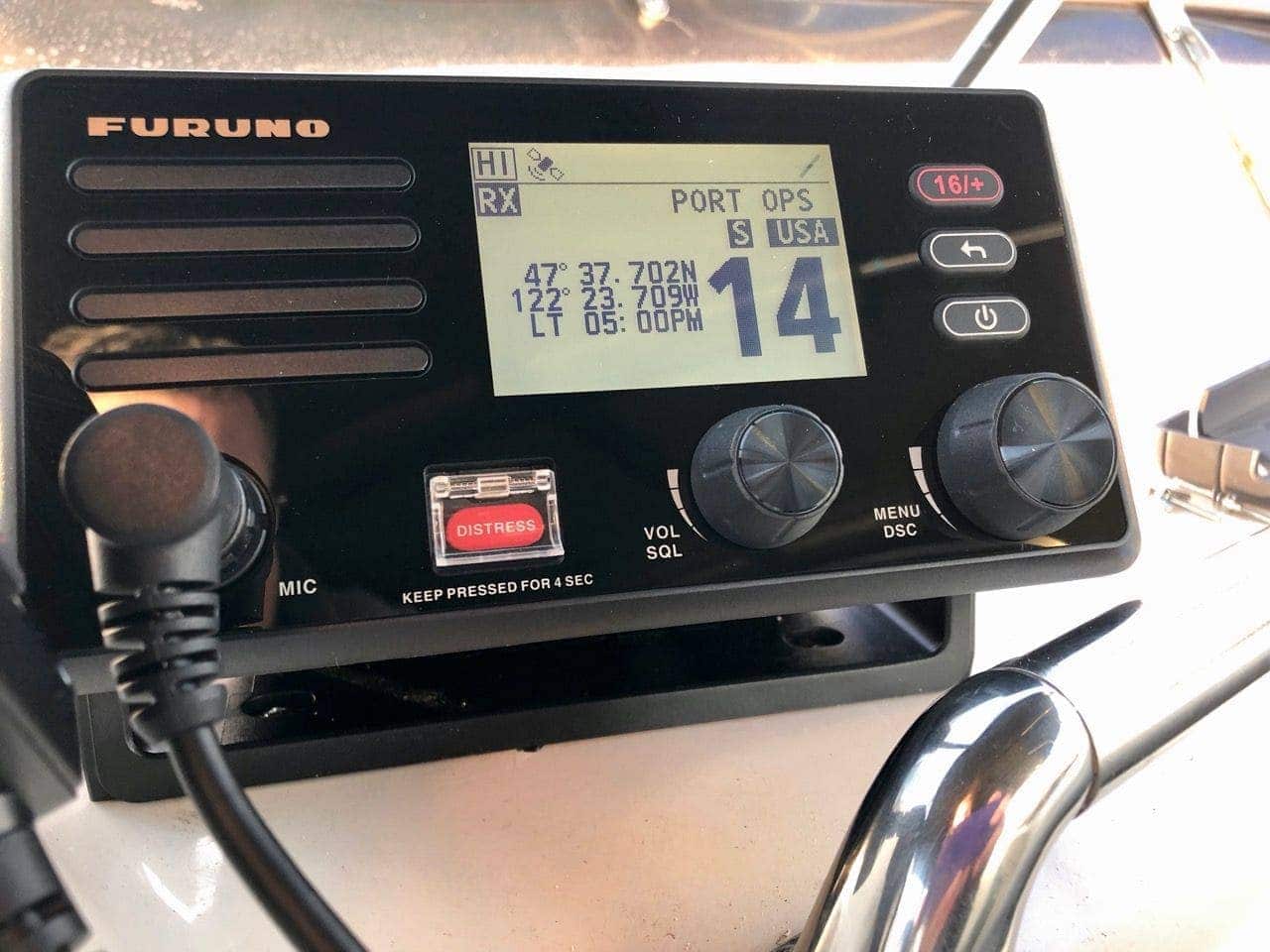
There is also a Furuno FM-4800 VHF radio here which is connected to the NMEA 2000 network as well. It transmits all AIS contacts that it is gathering, as well as a GPS source – the GPS on this thing is pretty amazing, and locks in within only a few seconds of powering on. I am really liking this radio, and will be writing about my initial impressions soon.
The LCJ Capteurs WindyPlug is also connected to the NMEA 2000 bus here, and provides a barometer onto the network. It also has a NMEA 0183 connection to the thin cable for the ultrasonic wind sensor on the arch.
Arch
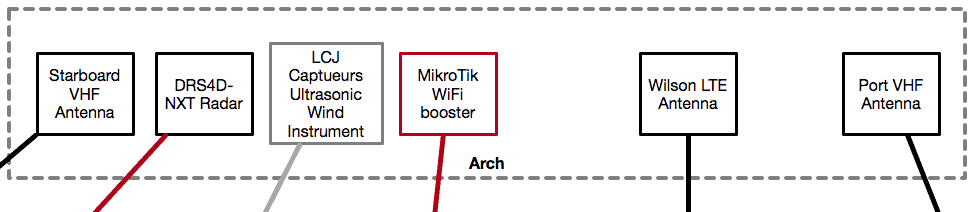
The arch houses mostly antennas and sensors that need to be up away from things. The biggest one is the Furuno DRS4D-NXT radar, which has an Ethernet connection back to the Furuno Ethernet Switch. In addition, the Wilson marine LTE antenna and MikroTik WiFi extender are also mounted here, both with connections back to the Internet Alcove.

The LCJ Capteurs CV-7 ultrasonic wind instrument is here as well, with a thin cable back to the WindyPlug connected to the NMEA 2000 bus drop point in the main flybridge.
Elsewhere
There are a few other places with networked devices:
Engine room – there is a temperature sensor here, as well as an Ethernet connection to the AXIS camera server. The AXIS has video cabling to three cameras right now – one looking out on the port side of the boat, our primary docking side, and two engine room cameras. I plan on expanding this later.
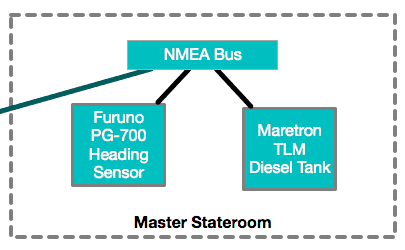
Master berth closet – this is where the Furuno PG-700 heading sensor is mounted, very low to the center of the boat.
Diesel tank – under the master berth bed is the main diesel tank which has a Maretron TLM ultrasonic sensor monitoring the level.
Future Plans
None of my boats ever stay the same for very long. I love trying new things and testing new technology. Besides new toys, I do have a few things I want to address in the next year or so:
New depth/speed sensor – need to replace this with a NMEA 2000 updated sensor – waiting to see if the newer ultrasonic one from Airmar is a good option.
Water tank monitoring – I want to add a Maretron TLM ultrasonic sensor to my water tank, as I’ve run it dry a number of times already. Unfortunately there is no inspection port that I can find, so I need to cut a hole into it while it is in use.
More cameras – maybe one on the starboard side.
VLAN switch – The Furuno Ethernet network is not connected to anything else, which is their recommended design. I would like to add a VLAN capable switch so I can at least have my router connected to it, and perhaps a few NATs and routes so I can utilize the AXIS camera server on other devices. I even posted on the Furuno Forums asking for clarification on network options, and was disappointed to find out severe limitations. Hopefully in a future version of software, Furuno will allow similar connectivity that they had with the TZT series, and that most every other vendor already has, including remote apps.
Power monitoring – you’ll notice I have zero power monitoring other than general voltage, which is very unlike my previous boats. Rendezvous has a new-ish Magnum inverter which I added a proper shunt to for SOC and amp monitoring, but that’s about it. I would like to add a Victron battery monitor and their Color Control GX product, and place that data on the network so I can see it while at the flybridge underway.
Generator monitoring – engine/other monitor product of some sort.
Circuit control – I’m evaluating a solution that would allow CZone style control of various circuits from any MFD. Targeting things like navigation lights, etc.
Archived Comments
These are read only comments from the old system. Scroll down to participate in SeaBits Discussions, our new interactive forum attached to each article.
David Geller
April 3, 2019 at 6:26 am
As always, a remarkably detailed and thoroughly fascinating read.
David Geller
April 3, 2019 at 6:29 am
What led you to the Axis camera server? I have Axis cameras at home, but not their DVR. When one of my cameras started failing, recently, I switched out to a 4K unit from Lorex, which turned out to be pretty darn nice. I didn’t bother with the Lorex DVR. Instead, I’m using Synology’s Surveillance platform. Have you explored that at all?
- Steve Mitchell
April 2, 2019 at 6:02 am
I’ve used all of those products, actually. I really like Synology’s platform for home stuff. I chose AXIS on the boat because Furuno supports them directly, and I wanted to be able to access the cameras from the flybridge and salon while docking most importantly. The port side camera shows me the entire edge of the boat from about 3/4’s of the way up the hull all the way to the stern.
I also chose the particular AXIS camera server, which actually uses older analog cameras, because the camera server does the hard work of converting the video streams. That way I can look at a four camera display on my MFD, while the MFD really is only processing a single video stream. I’ve played with a bunch of other MFDs from other manufacturers and there are quite a few limits in terms of the amount of simultaneous amounts of cameras you can display on one screen. The AXIS solved that for me, as well as it was supported by Furuno.
Never for Ever
April 3, 2019 at 7:05 am
Jeez how rich are you!!!! Just kidding, but man that’s a lot of toys. It’s going to take me a few reads to get it all straight in my head and pick out the bits I can use.
I followed along on your little cruise this past weekend. You sure can put on the miles at ~10 knots. That in itself is enough to make me envious.
- Steve Mitchell
April 3, 2019 at 6:01 am
It actually wasn’t as expensive as you would think, and I had set aside a decent amount of money to outfit the boat with proper electronics, plus sold a bunch of old ones. Plus, I would say about 1/2 of the stuff on the network is stuff I had already, so that saved a ton!
Rest assured I will be writing about some of the pieces on the network that are new including more detail on Furuno and Yacht Devices stuff.
Yes, going 10+ knots is quite a big change!
Paul Greenhalgh
April 4, 2019 at 10:42 pm
Great write up Steve….thanks. I am not clear about why you think the TZT2 MFDs are worthwhile though. The DRS-NXT radar can be direct connected via Ethernet to your Surface Book/TZ, as can a Furuno digital sounder. What upside do you see with these expensive pieces of the kit?
- Steve Mitchell
April 4, 2019 at 5:59 am
There are quite a few reasons for the TZT2s.
First, they are marine grade and protected against the elements. I have them mounted in my flybridge which while protected from the spray by canvas, water could still get in there, and they are exposed directly to the salt air, as the flybridge is open to the back to the elements. A Surface Book would not fare as well during some of these misty mornings that I’ve bee out in lately. Of course, I could take it in when I’m done, but what if I needed it out there while exposed?
Second is visibility – if you have ever put a pair of polarized sunglasses on and attempted to look at a computer screen, you know what I mean. The Surface Book has the same issue. Yes, I could get a marine-grade display that can overcome some of these things (not all) but those are expensive too. This is probably the single biggest limitation with any laptop that I’ve come across.
I’ll group these last ones together – reliability and simplicity. The Surface is a great laptop, but the MFDs are built to do one thing, and they do it very well. I have seen Time Zero Professional on the PC crash for one reason or another, while the MFDs rarely ever do, and if they do, there’s a second one to take over, plus alarms that ring letting me know something has happened. I like having something more “solid state” that is running the boat while underway. I could invest in multiple PCs, but now we’re talking about something far beyond what two TZT2s cost.
Don’t get me wrong – if there was a good redundant, reliable, and easy to view solution for PC, I would never buy an MFD. But when a good Surface Book costs more than a TZT2 by almost $1000, the choice seems easy right now.
Frank
April 5, 2019 at 3:40 am
Very interesting write-up. I am just starting on a similar path upgrading a 25 year old boat. Starting with the NMEA2K network this week-end, adding an EMU-1, Airmar Log/Depth and small Furuno display. My plan is to put in a higher end NUC computer to run touch-screen display(s) and forego the MFDs. Got a bit worried about you mentioning crashes on both the Timezero and MFD’s. I only have a salon drive station, so weatherproof displays are not needed. Here the 12 inch Furuno MFD is at least as expensive 2800 EUR as a higher end Surface book. And much more than a i7 NUC with a 12 inch touchscreen. Really enjoy learning from your experience with the upgrades
- Steve Mitchell
April 4, 2019 at 5:57 am
I think every computer based system crashes at some point – MFDs, TimeZero, and the like. I’ve had MFDs from pretty much everyone, and they all freak out, reboot, or lock up at some point. The key with any of these is that when they do, something on the network, or the device itself should set off an alarm when it happens.
When TimeZero Pro on the PC crashes, there is really no alarm other than, eventually, something like the autopilot or other device that is relying on data from it complaining. And even then, it would be a more secondary message. If one of the TZT2s crashes, the other one starts beeping incessantly, and all other related devices also signal a change in GPS signal, autopilot data, etc.
I also have noticed that TimeZero Pro on the Surface can really tax its CPU. At times the fans run at 100%, and if the sun hits it, it gets even hotter. Sometimes as well, virus scan, updates, and other things affect the performance of the Surface. Of course, you can turn those things off, but then you have a Windows machine that will eventually have issues. I think an MFD still has a place on a boat because of some of these things, but every year it gets closer to being less important.
I have a NUC on board as well running Linux, and considered using two of them, one at each driving station, and touch screens so that I could avoid buying an MFD, but decided against it. The usability of an MFD in bad weather, in sunshine, etc. sold me on having them as the “solid state” device running things.
However, the design of my system would allow a PC to be the primary controller at some point in the future. Time Zero Professional is a very nice piece of software, and I could see using that once I found a suitable set of monitors for both the salon and flybridge. I have yet to find one that has really good touch in all conditions, and also is viewable in sunlight and sunglasses.
Sam Bartlett
July 30, 2019 at 3:36 pm
Very nice job, Steve!
I’m just about to begin planning a rewire for my boat and having a similar debate with myself about CZone and traditional panels… distributed power seems the way forward… I have a necessary rewire to do and therefore the (debatable) luxury of starting from a blank canvas if I want…
- Steve Mitchell
July 31, 2019 at 5:13 pm
Thanks Sam!
I would love to put a CZone system in my new boat, but the financial part still just doesn’t work out. I assume the only way to get one reasonably is to buy a newer boat with one already installed, which in and of itself is probably pretty expensive too!!!
Carl G
April 19, 2020 at 3:48 pm
Steve – We have an all PC/IP Navigation implementation (No MFDs) driving 3 NEC displays in the Pilot House and echoing output to a pair of sun bright displays on the Fly Bridge with a completely wired redundant NAVPC (standby) which has never been needed in 12 seasons (knock on wood). They were both Win7 based and tuned to behave more as an appliance rather than a general purpose computer and generally kept from surfing the internet excepting the seasonal pull for Active Captain Updates, Chart updates, etc. I am concerned after reading your last reply that Win10 may prove destabilizing. There is a lot that can be de-tuned in Windows and the last time I did it with Win 7 was ~10 years ago. I am wondering if you might have a list of recommended changes to tailor Win10 into a more robust marine appliance?
To switch between my 2 Navigation PCs I use a USB switch to redirect an NGT-1 connection. I should probably purchase a 2nd dedicated NGT-1 but that’s a 2nd BUS tap and I am running shy. I’d prefer to just have the N2K PGNs available to TZPro via TCP/UDP and remove all my USB wiring and switch. It looks like the NEMO would make a great gateway for use by multiple simultaneous clients. I see in your diagram that your NEMO is isolated from TZPro I assume your data is being repeated via the MFDs? I am wondering if you’ve tested the NEMO with TZPro 4 for compatibility (bidirectional?) and performance? Does the NEMO provide for any PGN filtering to minimize ethernet traffic?
Other than the NEMO, are there other offerings that do the same?
Sebastian Lourens
April 23, 2020 at 6:06 am
Fantastic read. I have a similar setup on Missy although I’ve opted for a W2K from Actisense which has a data logger built-in. I’ve been playing around with a few new apps too… There seems to be a new one every day!