

One of the most important pieces of technology on any boat I own is the autopilot and systems that drive it. Rendezvous came with a partially functioning autopilot that I was not able to rely on, so I started searching for a new solution.
Searching for an autopilot
Part of this search wasn’t just simply about an autopilot, but about all of the systems around it. Unfortunately in the marine electronics world, you can’t mix and match too many components without having compatibility issues, or at least quirks that become irritating quickly. This led me to a bigger discussion of the main key systems on the boat, the features I needed and wanted, and what solution(s) provided those.
This entire process is the subject for a dedicated article, but at the high level, I consider three systems critical to the core of navigating and moving my boat: an autopilot, a radar, and a display of some sorts for both. After a lot of research, I chose Furuno for all three of those components. Trying to use a mix of vendors is possible, but as I mention above, they rarely work reliably together. In the case of radars, they are almost all proprietary to their own displays or chart plotters.
I also wanted the deep integration you find with autopilots and chart plotters where the manufacturer likely has to be the same. Being able to control the autopilot from the chart plotter, make course changes, reset the XTE, and control it from a different location where there is a chart plotter but maybe not an autopilot control head are all desirable to me.
Existing System
I removed the existing autopilot shortly after I purchased the boat. It was a Furuno NavPilot 700 system but with some older components mixed in. It never worked quite right, even under the simplest conditions. It was also directly connected to the Furuno chart plotter that I am also replacing, which really did not work well for the type of route planning and navigation I planned to do.
I did connect the Furuno control unit to my NMEA 2000 network for a while, and played around with sending courses to it from Coastal Explorer, several Raymarine MFD’s, and TimeZero. None of them worked well, many of them did not work at all. That sort of reliability and finickiness is not something I want to deal with on a day-to-day basis.
The worst part of the install was the compass, which was placed in a center part of the boat, very stable area, but directly above the main battery switches and cables for the engines. Several times while trying to calibrate it, I watched while the compass essentially spun around in circles over and over any time the engines were on and charging the house bank. After 8 different attempts to calibrate it, I gave up with that location, and tried another. It worked better, but still had interference from nearby sources.

One thing I did keep is the newer Type 2 hydraulic pump which was wired and plumbed in already. I had not seen any issues with the pump while using the existing autopilot, so it seemed like a good way to not have to deal with a hydraulic mess and save some money.
I was also able to keep my rudder reference unit wiring, which was nearby.
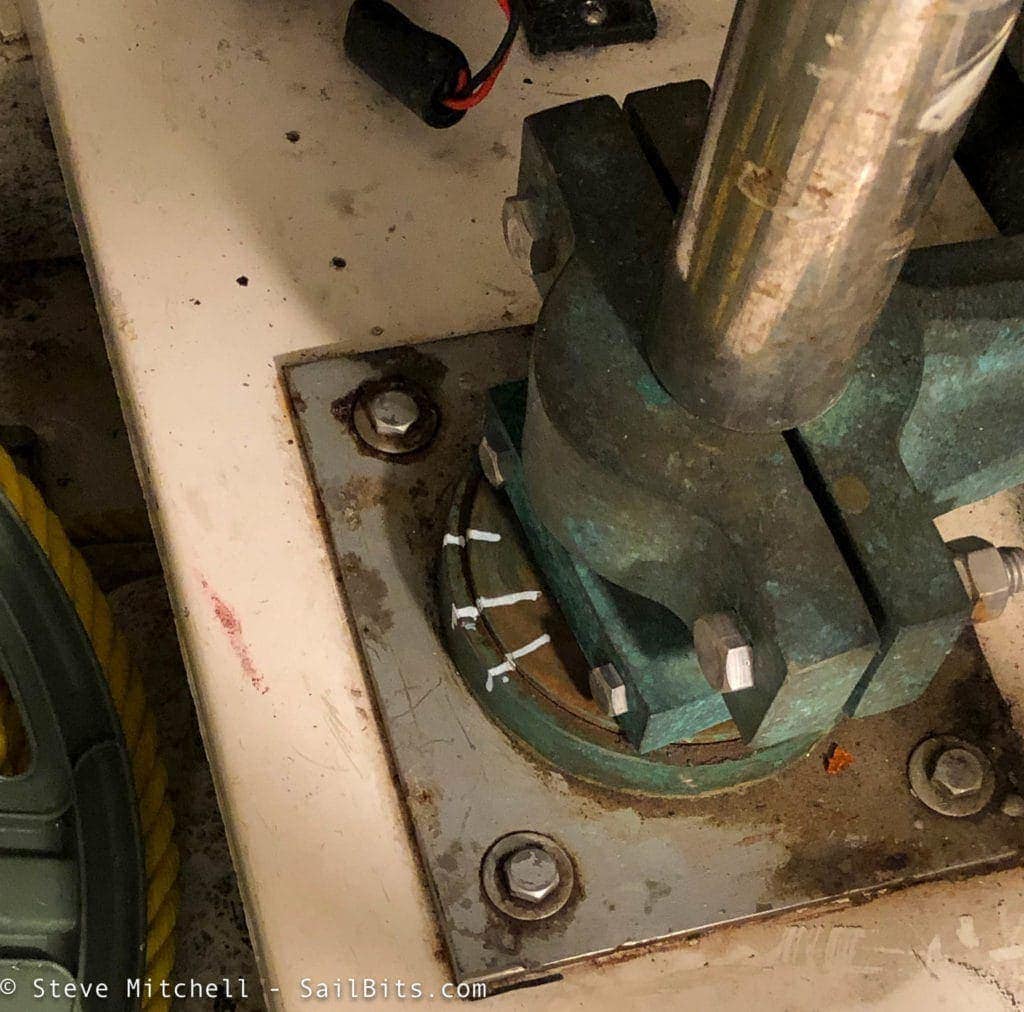
I also took the time before removing my old autopilot and rudder reference unit to mark both rudder posts so I knew where rudder center was. I used my trusty Sharpie white oil paint markers, which I use for all sorts of things around the boat. This would help me when installing the new autopilot and rudder reference unit.
Choosing a Vendor
I went into this with all four of the major vendors on my list: Raymarine, Garmin, Simrad, and Furuno. Initially, I leaned towards Raymarine as I had one of their Evolution autopilots on Grace, and loved it. I had no issues with it, it worked reliably the 2 years I had it in place, and the integration with their Axiom MFD was great.
Simrad was at the bottom of my list, as I had a previous generation of their autopilot on Jammy, and it was a nightmare in terms of reliability and just general usage. It did look like there were some improvements in recent years, but I also am not a fan of their rather MFD operating system. Most of the calls I get to consult on fixing systems have do with Simrad, so that definitely played into my decision to rank them at the bottom.
Garmin is very highly rated by many people I know as being one of the easiest systems to use with a reliable set of hardware. I am not a big fan of their user interface, but it is pretty easy to use. What I did find is a similar polarized opinion around their autopilots – some people love them, some hate them with a passion – very similar to Simrad. What was frustrating to me was trying to get specific technical details on the installation and usage, along with a confirmation it world work with my existing pump. I was referred directly to Garmin to confirm the pump can be used, and after several attempts at contacting them, I was generally given the advise that I should spend $2000-4000 more for their branded pump. That combined with the instability with their autopilots I had heard from a number of folks took them out of the running.
Furuno originally was not high on my list either, having dealt with the auto pilot on Rendezvous that was not working. However, after reviewing their new NavPilot 300 system, and chatting with folks on their helpful forums, they popped up to #2 on my list.
The Choice
After reviewing the top two, and delving deeper into the chart plotter and radar options, I chose the Furuno NavPilot 300. This was mainly driven by the quality of the auto pilot, radar, and the way I can feed all of this courses and information from the chart plotter, PC, and other sources. The NavPilot 300 is also 100% NMEA 2000 based, which meant no proprietary cabling specifically for the pilot.
Furuno specifically markets the NavPilot 300 to center console boats, but after my discussion on the Furuno forum, it seemed like it would work just fine on my boat as well. The main control display looks like it has all the features I need, it comes with a handheld remote, which would be nice for a second driving station, and it has a good main control unit with easy cabling.
Unboxing & Installation
I ordered the NavPilot 300 bundle with the PG700 heading sensor from The GPS Store. This bundle included the NavPilot 300 itself, and the venerable PG700 heading sensor, each in their own box. The NavPilot 300 is packaged just like everything else I’ve seen from Furuno – fantastic boxes and components, along with clear lists of everything included.
I also ordered Furuno’s rudder reference unit FAP6112 even though the NavPilot 300 does not require it. I wanted it so I can see where my rudder is pointing when I am docking and in other situations.

There’s a ton of good documentation as well including an operators manual, quick guide cards, and individual sheets for specific mounting options and parts.

Here is everything out of the NavPilot 300, PG700 and rudder reference boxes.

The main processor unit (FAP-3012) is a bit smaller than the 700 series autopilot, and comes with pre-wired leads ready to connect to various things.

It is pre-wired with the following connections:
- DC power
- Hydraulic pump power
- Rudder reference
- NMEA 2000
- EVC system connection
- Safe helm / event switch
Everything is labeled clearly and comes with plenty of length. I only used the DC power, hydraulic pump, rudder reference and NMEA 2000 connections.
It was very easy to install the processor unit. I had a good spot already from the previous autopilot, and a NMEA 2000 bus point nearby. After connecting that, the DC power supply wires, the existing rudder reference and hydraulic pump wires, and mount the whole thing securely.

The NavPilot 300 also comes with the handheld remote, control unit, cabling, cover, and mounting options. One thing I do not like about Furuno is that almost every product I’ve ever purchased does not come with a bail mount – they are all options you have to order, and are sometimes hard to find through normal vendors.
The control unit is very similar to the 711 series one, minus the twisty dial in the middle.

The biggest difference from the older 700 series is that the control unit uses NMEA 2000 connections, which is one of the reasons I went with this system. I already have an extensive NMEA 2000 network on board, and being able to add the control unit wherever I had an existing open connection was very attractive.
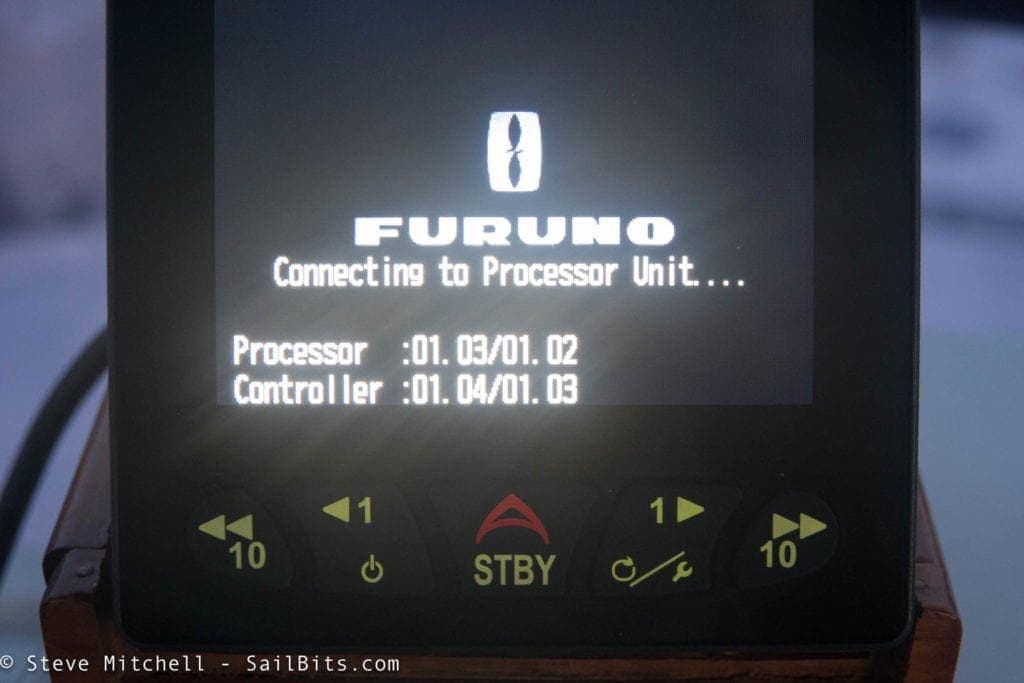
Unlike older control units which were directly wired to the processor unit, the NavPilot 300 unit searches the NMEA 2000 network for the processor when first starting up. I have noticed that sometimes this can take up to 30 seconds, and in rare cases, the search failed. I do have an older version of software, and will be upgrading it as soon as the rest of my Furuno stuff arrives.

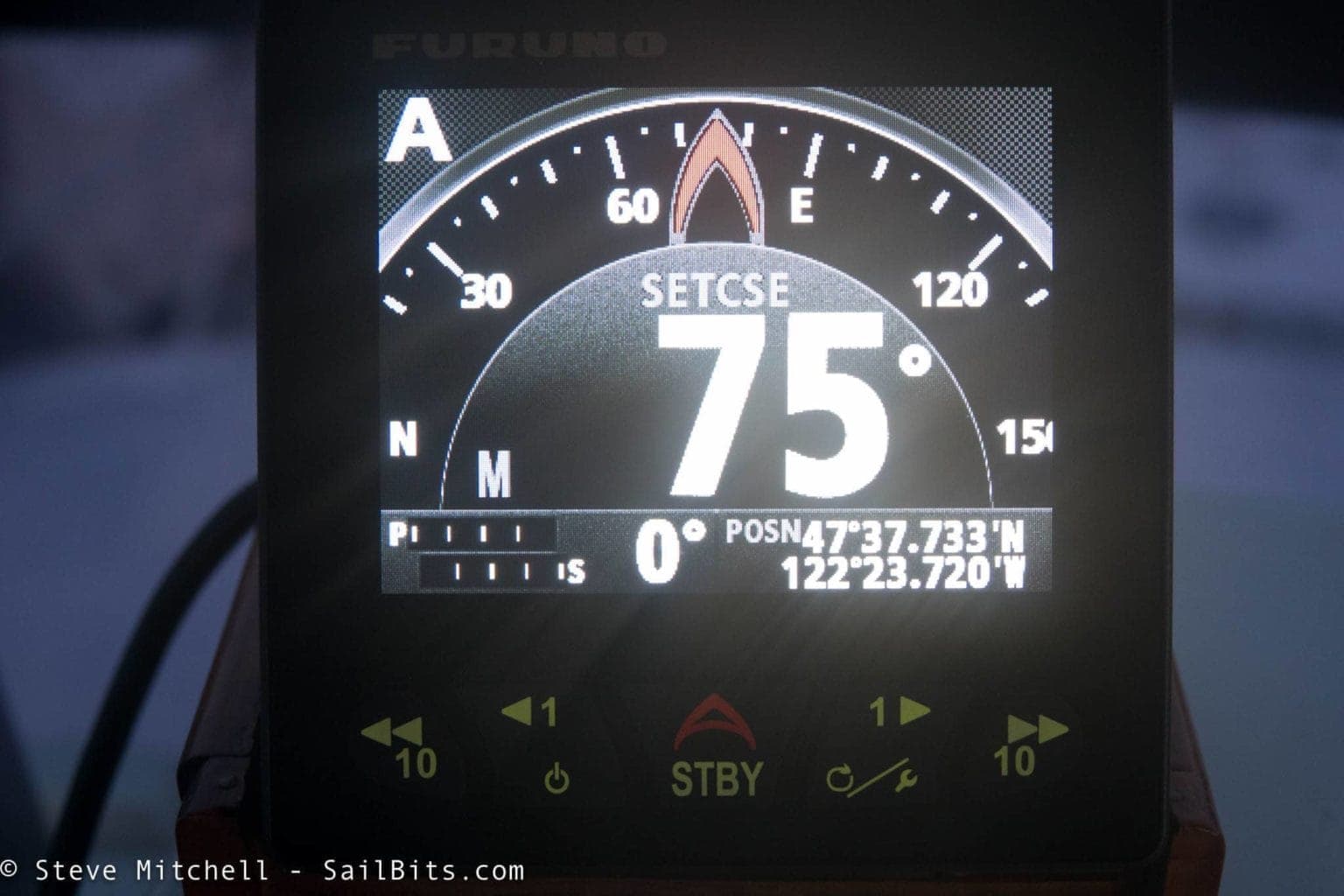
The control unit is very bright and easy to read, and has a few configurable screens for each mode. This is one area where the NavPilot 711 has an advantage, as there are more screens and configuration options.
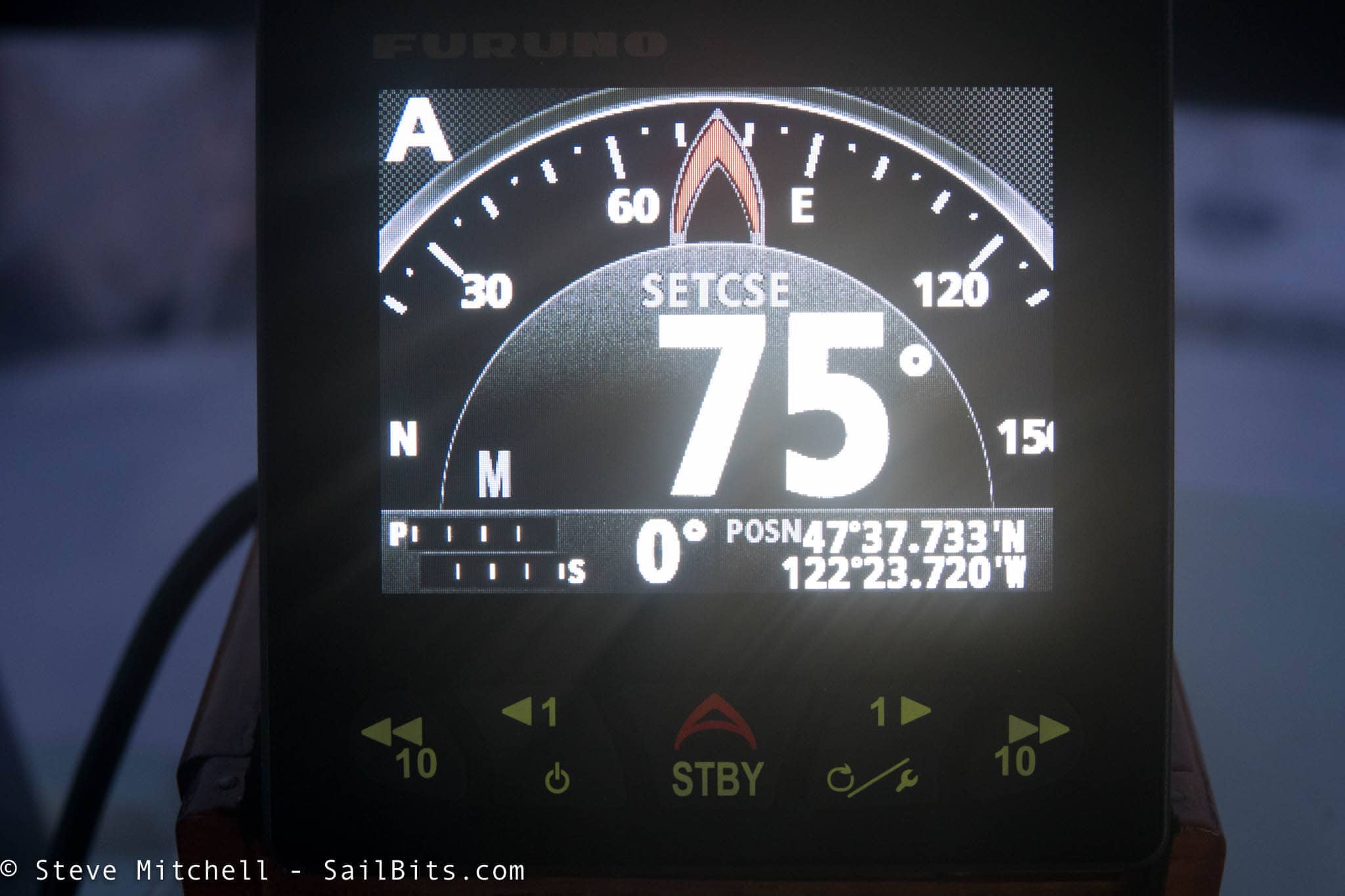
Above I have the NavPilot 300 set to a compass course, and you can see the icon of the boat changed to include a red section which indicates the course of the boat. The rudder position is in the bottom left, and my position on the bottom right. You can change the bottom right data to various different things – SOG, COG, GPS location, etc.

One of the big selling points to the NavPilot 300 is the handheld gesture remote. I wasn’t particularly interested in the gesture part, but I was happy to have a second way to control the autopilot. I intend on using this at the lower helm.

The display is pretty small, but very easy to read and backlit.

You can control the entire system from the remote, including switching modes, which will be very helpful at the lower helm. I did notice that the range was pretty short – you can see the signal strength in the bottom left corner at only one bar. I was within 10 feet of the main processor unit, and it was pretty low. It did not work from my flybridge location.

The rudder reference unit was almost identical to the one I removed with my NavPilot 700 setup. I was able to re-use existing wiring from that location to the processor unit, saving me a bunch of time. It was pretty simple to install the crossbar into the rudder since there was an older system there before.
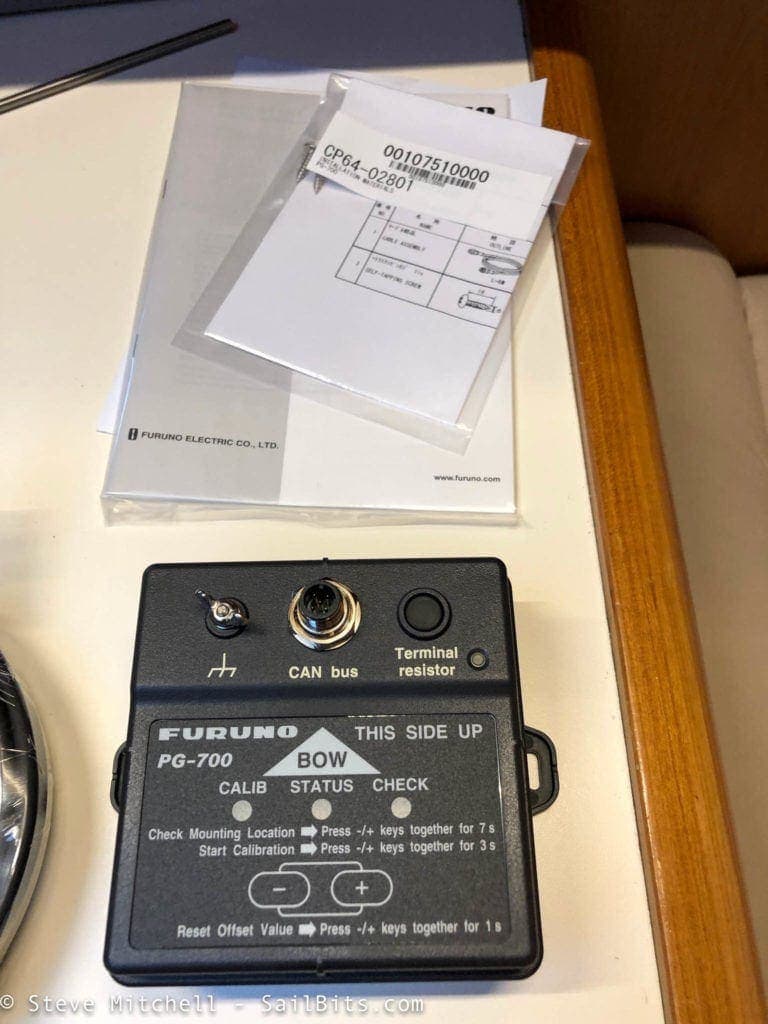
The other critical part of the system is the PG-700 heading sensor. This has been around a while, but came bundled with the package I chose. I had an older heading sensor I removed that was never successfully calibrated, and mounted in an incorrect place for proper operation. The PG-700 was easily mounted in a great new location, and calibrated the first time out on the water. It is also NMEA 2000 certified, so no proprietary wiring.

The PG-700 has a cool mounting bracket that can be flipped different ways to mount on a flat surface, a wall, and in other configurations.
Opinion so far…
Everything was pretty easy to install, especially because of the NMEA 2000 compatibility.
So far I’ve used the NavPilot 300 for about 20 hours of time on the water. Most of my usage has been with Coastal Explorer routes driving the autopilot for the various places we’ve been going. I’ve also used it a bunch just holding a compass course.
I’ve tried the Nav Eco and Nav Precise settings, and seen a difference between both. I prefer Nav Eco as it seems to be slightly less aggressive with course corrections. The existing Type 2 pump has been working very well with the system.
I have had the control unit lock up a number of times whenever I turn on the handheld remote. It sounds like there is a new software release that could help with this.
Other than that, the system has performed very well, and I look forward to using it with the rest of my extended Furuno system being installed soon.
Archived Comments
These are read only comments from the old system. Scroll down to participate in SeaBits Discussions, our new interactive forum attached to each article.
Larry O'Keefe
February 17, 2019 at 3:34 pm
Steve, I am also considering the Furuno NAVpilot as a fully redundant system to complement the older Simrad AP20 system on the boat, and am also trying to decide between the 300 and the 711c. I like the idea of the gesture control for the 300, and don’t think I need the additional features of 711 (jog levers, etc).
Have you tried the Power Assist mode on your 300? That also seems like an attractive feature of both the Furuno units.
Larry
N5012 Miss Miranda
Anacortes, WA
- Steve Mitchell
February 17, 2019 at 6:12 am
Keep in mind that the 300 has limits in terms of overall current and drive types compared to the 711. I’d make sure with Furuno that your boat, pump, and the other pieces are compatible, if you have a pump already, which it sounds like you do.
I can’t use Power Assist or Safe Steer as I have a standard Type 2 pump, and those features require an Accu-Steer pump with wiring between the AP and the pump. Seems like fun features though! - Larry O'Keefe
February 17, 2019 at 10:34 pm
Thanks for that tip, Steve. I went back to the Furuno Forum and asked the question. I would be using the HRP35 or equivalent pump, which is too much for the NAVpilot 300. So, I’ll be going with the 711c.
ElCidnumber1
April 11, 2019 at 5:08 pm
Steve, fantastic write up. I’m I’ve been looking to switch out my old Wagner (now glitchy) auto pilot, and with my recent Furuno radar purchase the navpilot seems a good fit. We have an early 80’s 43′, full keel, sailboat. With everything I have read or have been told indicates the Navpilot300 is only for small boats and that I should be looking at the 711. However I can find no actual reason for this in any of the literature.
Although it’s a power boat your boat is a similar size to ours. So could i please ask why did you go with a 300, rather than 711? And do you know of any reason why the navpilot300 would not work in our case?
The 300 appears to be a lot more cost effective, and really I don’t need a lot of functions just a simple working autopilot.
Cheers,
Chris
Vancouver,BC
- Steve Mitchell
April 11, 2019 at 6:14 am
Chris,
I had a number of discussions with Furuno about using the 300 with my boat, even though they do market it for smaller center console boats. The keys seemed to be around the type of autopilot pump and the size of the boat and pump overall. The 300 will only work with hydraulic pumps, so if you are thinking of using an electric or other setup, the 711 is the choice. It also has a max capacity in terms of amps that it can send to the pump, and thereby limits the overall size of that pump. Usually bigger and heavier boats require a bigger pump. From what Furuno told me about my boat, I’m using a Type 2 pump and it was rated at a particular amount of fluid it could move, and they said the 300 would be fine for it.
I had the 711 on the boat prior to moving to the 300, and I didn’t like it as it used proprietary or older cabling between all the pieces. That meant for two driving locations, I had 4 cables going between those, then one going to the heading sensor, and rudder reference unit. The 711 control system unit has a NMEA 2000 port, but it was limited as well in terms of what could go back and forth. The 300 is NMEA 2000 throughout which made cabling much easier.
I would post in the Furuno forums with your specific boat size, length, weight, and pump information and ask if the 300 would work for you, or you can call their support as well, or chat with a good local dealer. Hope that helps!
Adam Hyde
March 4, 2021 at 3:47 pm
Steve, How’s it been going with the Navpilot 300? I’m particularly interested in what you do when a log suddenly appears in front of the boat. Do you grab the wheel to override, or do you have to disengage the autopilot and then steer away? Can you quickly point the remote for a quick turn? I’m considering getting this setup because Raymarine doesn’t seem to have a remote I can use at my lower station or on deck.
- Steve Mitchell
March 4, 2021 at 7:08 pm
Hi Adam,
The NP300 has been flawless since installation. I’m actually adding a second control station just to have identical instruments at both locations, mainly for ease of use and if someone other than me is driving.
I use the dodge functionality in either the remote or main units to avoid a log. Most autopilots have this function, and it works very well.
Some autopilots have the breakaway capability you’re asking about – where you can grab the wheel and steer, and they disengage. That usually requires a unit at the pump, if it is hydraulic, that detects something else controlling the boat and stopping the autopilot. They can be expensive and require a specific pump and other hardware.
I’ve never had one of those in the 15+ years I’ve had autopilots and have no issues just using the dodge feature or turning it off. - Adam C Hyde
March 4, 2021 at 10:31 pm
Great info. So in your opinion at 18 knots I would have time to disengage/dodge and then turn? I guess I could start the turn with the wheel while simultaneously hitting the button? Also do you think the Raymarine rudder reference unit would work with the Furuno Autopilot with my inboard? I’m a bit doubtful the resistive values are the same, but perhaps you can calibrate or tweak the resistance a bit to match it? I have a Raymarine unit connected to an Arduino at the moment so I’d rather not buy another one. - Steve Mitchell
March 4, 2021 at 11:30 pm
It would really depend on how far away whatever it is that you’re trying to avoid is from the boat. Any autopilot is going to allow you to avoid things, but depending on how quickly you react.
I don’t think you can calibrate the rudder signal on any/most autopilots – they usually assume one of their own is there, but I suppose you could meter them out and see.