

It’s no secret that I love Victron’s control ecosystem. On my last three boats, I’ve had Victron bits that have helped provide visibility into the power system. Earlier this year, I finished the conversion on Rendezvous to a mostly-Victron system which I wrote about in Victron + Wakespeed + Battle Born power system.
One of the glaring holes in Victron’s communication has been with NMEA 2000. In particular, their GX-series of devices has had very limited capabilities – in fact, they have only been able to receive information from the NMEA 2000 network, and only tank information. It was nice to be able to see tank levels on their devices, like the Color Control GX, but most people with NMEA 2000 tank level stuff already have ways of displaying that.
There were various other NMEA 2000 interfaces you could get from Victron, but those were specifically for controlling devices, and as a side effect, you got some info from those devices on NMEA 2000. I had the VE.Direct to NMEA 2000 interface, commonly used between a battery meter or solar charge controller, and I also had the VE.Bus to NMEA 2000 interface, used between an inverter/charger and other devices. However, using these had drawbacks – some features weren’t available unless you used native Victron busses.
Enabling NMEA 2000
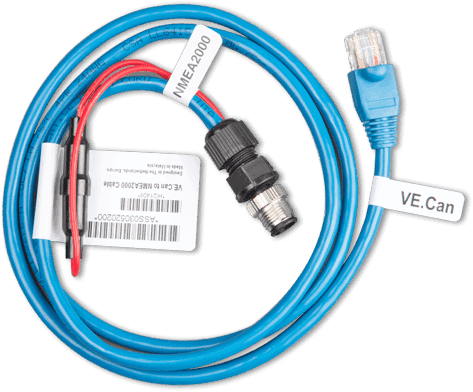
You’ll need to be running v2.40 or later of Victron’s GX software – they released v2.41 recently that addressed some initial bugs in the NMEA 2000 support. I’m using a Color Control GX for these examples, but it also works for other GX products like the Venus, etc. You will also need a VE.Can to NMEA 2000 cable, available through Victron resellers for about $95 US. I purchase my Victron stuff from PKYS.
When you install the VE.Can cable, you’ll need to make sure your VE.Can network has a terminator (should have been provided with the GX product you have) and if you have an existing, powered NMEA 2000 network, remove the fuse from the cable so you don’t create a short circuit.
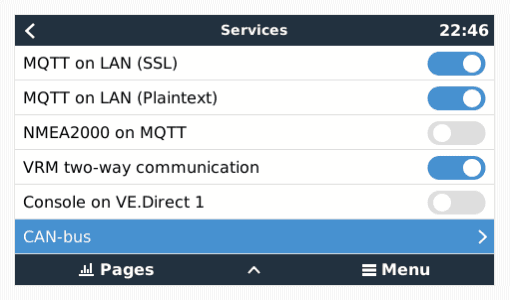
Once you have the cable connected, in the Settings -> Services menu you will find an option for CAN-bus.
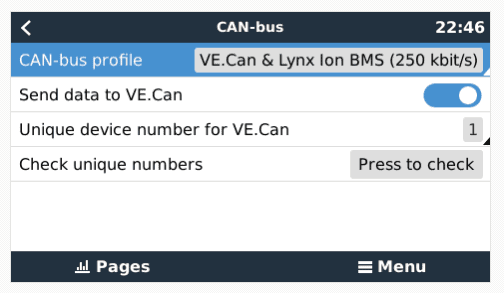
Once inside the CAN-bus menu, using the default profile, and turning the “Send data to VE.Can” on should get traffic flowing to your NMEA 2000 network.
Examining the NMEA 2000 traffic

I have the following Victron devices:
- Color Control GX – what the VE.Can to NMEA 2000 cable is plugged into, as well as everything else.
- MultiPlus 12v 3000w inverter/charger – connected to the GX via VE.Bus cabling.
- BMV-712 smart battery monitor with shunt – connected to the GX via VE.Direct cabling.
I also have several MPPT solar controllers but they aren’t installed yet. These devices provide all of their wealth of data to the Color Control GX, and it now is sending out data to my NMEA 2000 network. You can see four devices listed above – the MultiPlus is listed twice.
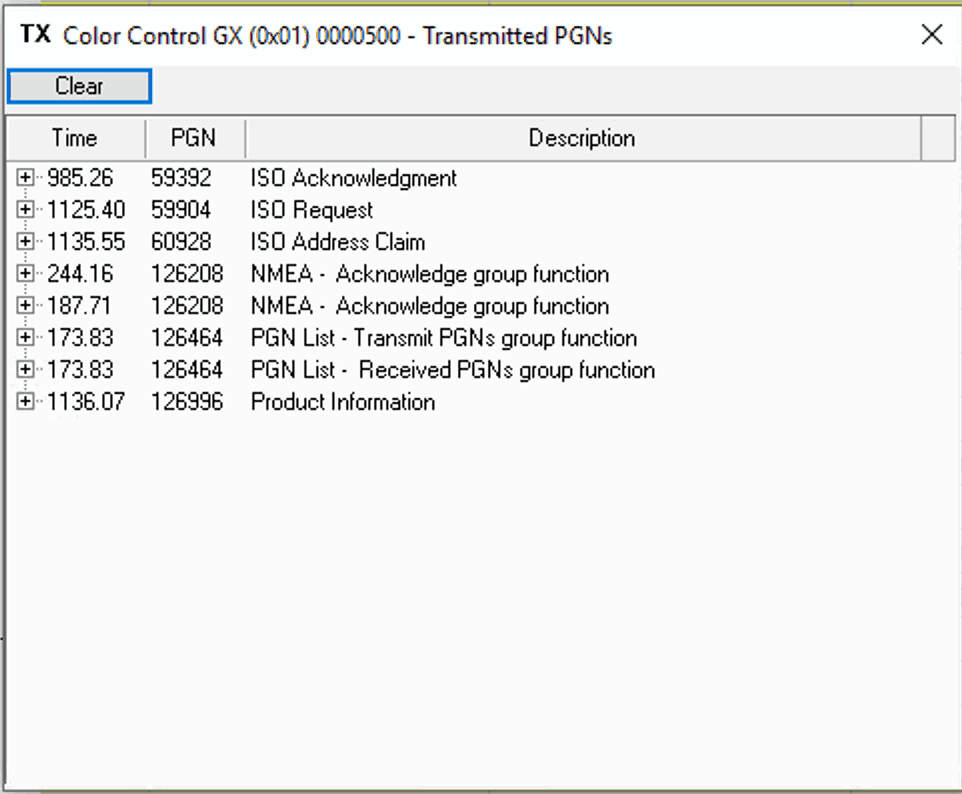
The Color Control GX shows up as a device but doesn’t send any electrical PGNs as it is just the device facilitating the communication for the other devices.
Battery Data
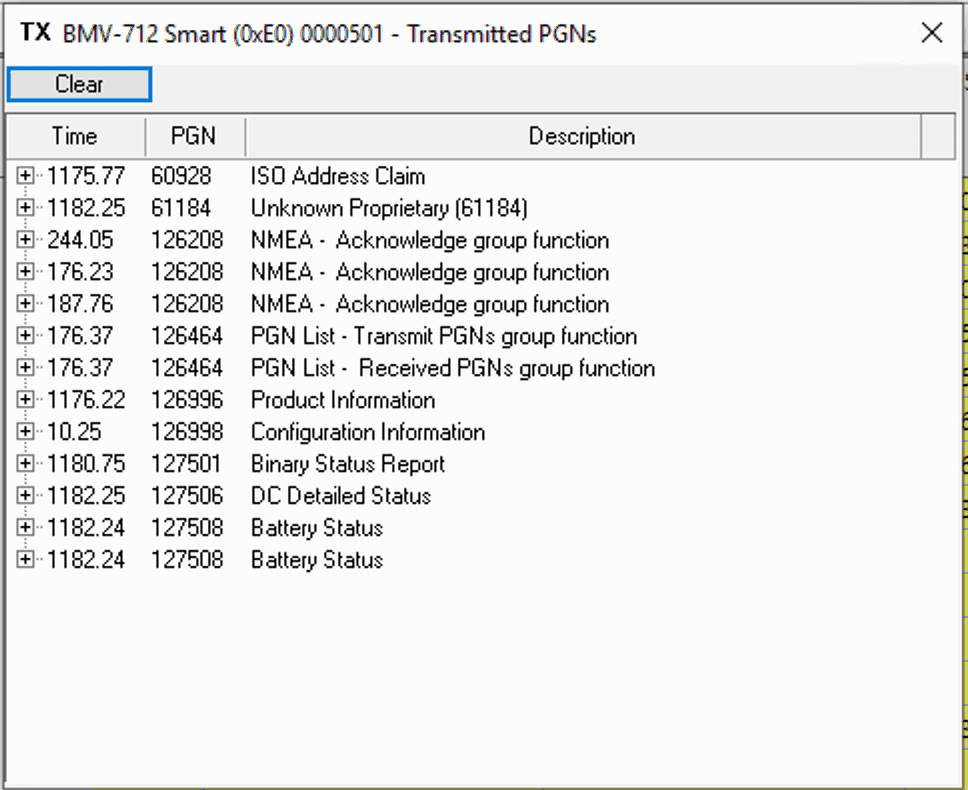
The BMV-712 is sending two useful PGNs – 127506 and 127508.
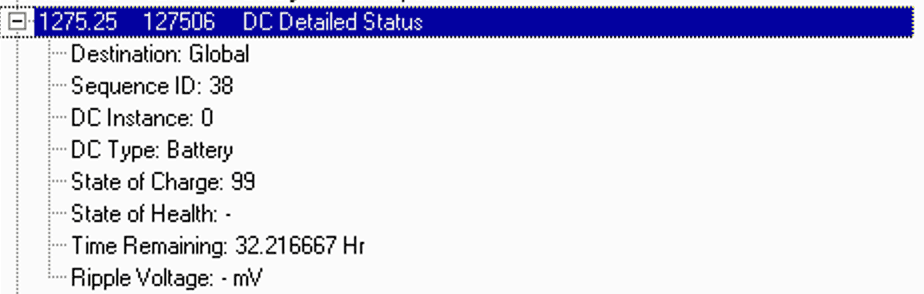
PGN 127506 – DC Detailed Status includes the state of charge (SOC) and time remaining. The other values do not appear to change or have data in them.
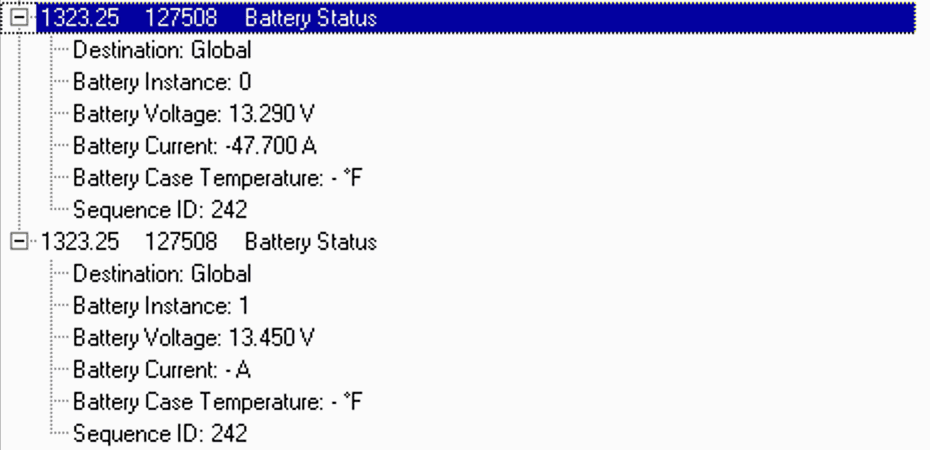
I have two batteries being monitored by my BMV-712 – my house bank is connected to the shunt and is considered battery instance 0 above, and the generator battery is connected to the second monitoring point only for voltage and shows up as instance 1.
I now have battery voltage, battery current, state of charge and time remaining for my house bank, battery voltage for my generator battery all on the NMEA 2000 network. This was the primary info I wanted so that when I was elsewhere on the boat I could see the state of the house bank at a glance.
Inverter / Shore Power Data
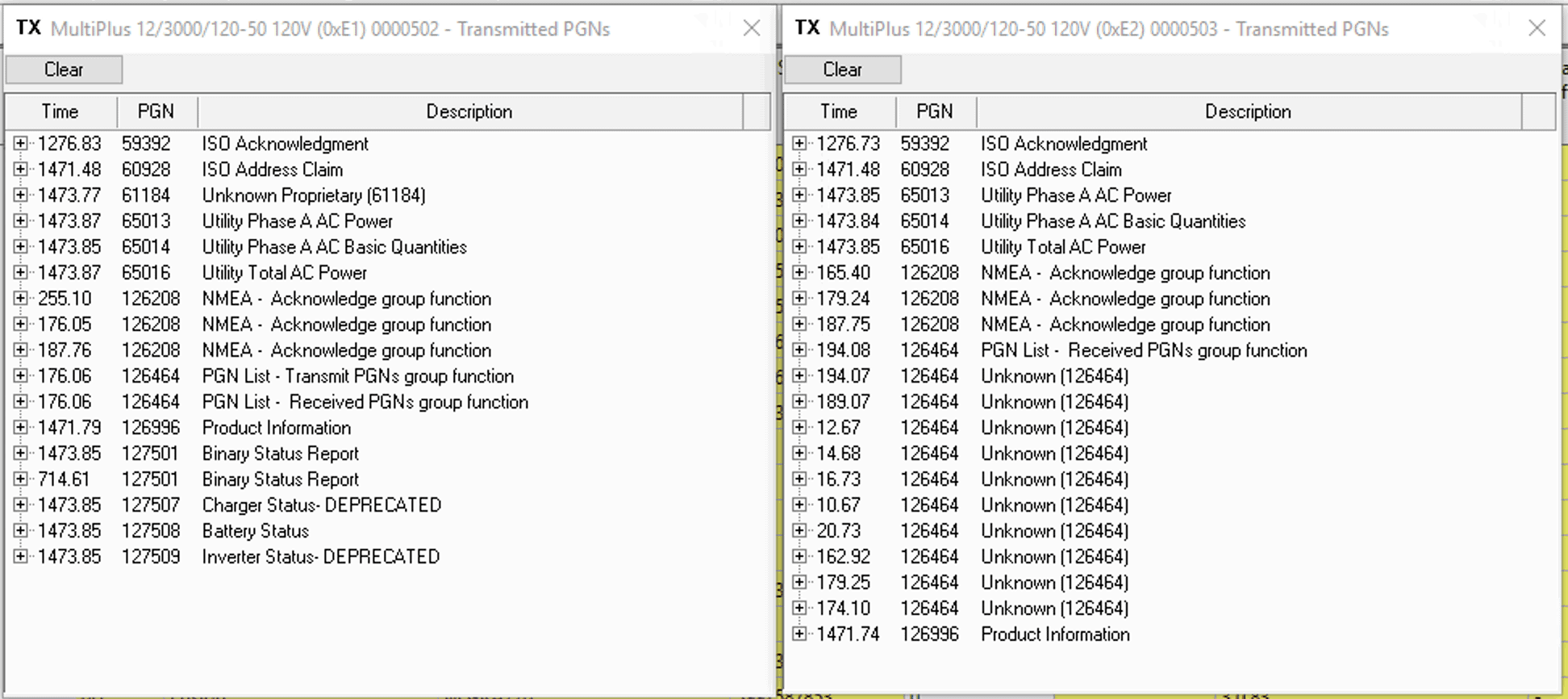
The data being sent out for the MultiPlus is a bit different. There are two NMEA 2000 devices.

The Actisense NMEA Reader displays what the two MultiPlus devices are and shows that one is utility/shore, and the other is the output.
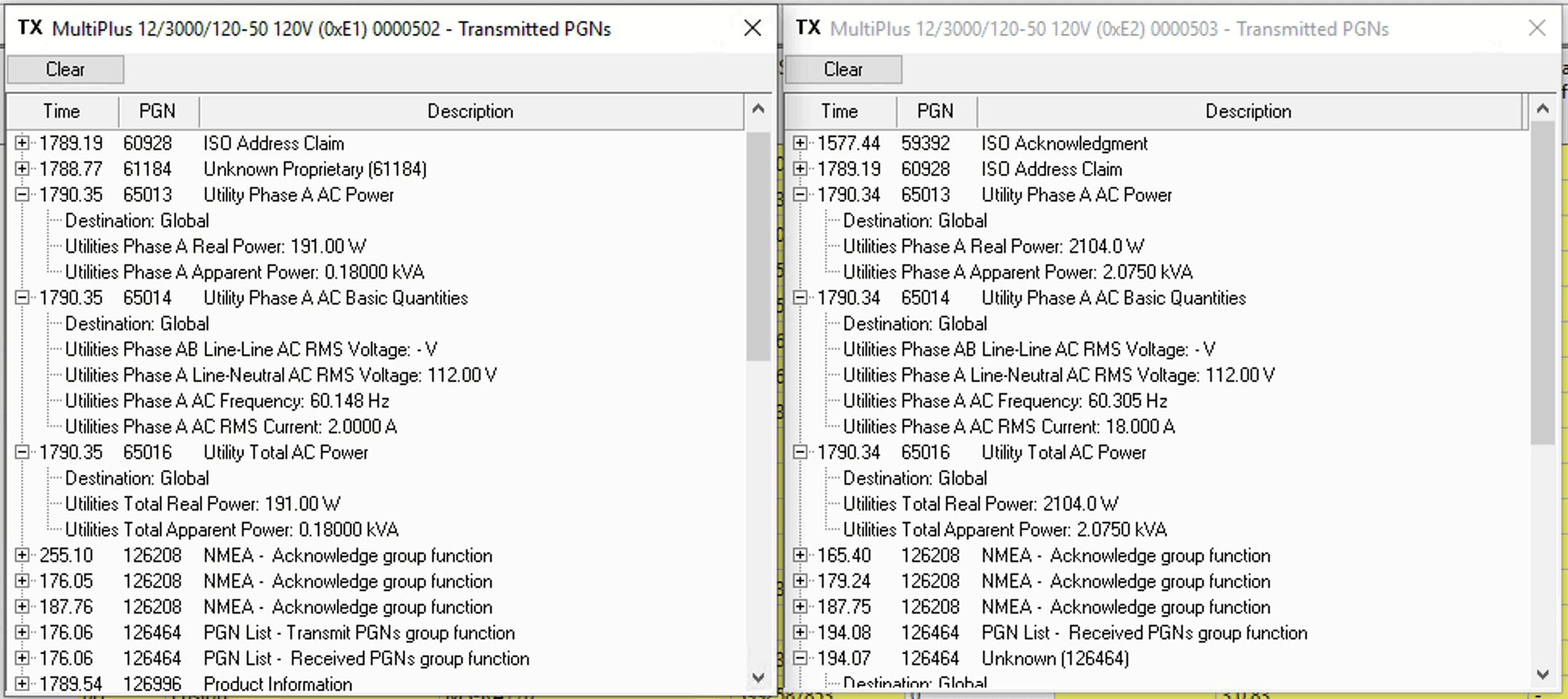
Here’s what they look like when I am on shore power. You can see both devices have data from AC power sources, but the right one shows a much higher value. I assume this is my water heater or other devices that aren’t on the inverter side of the circuit – just the AC pass through.
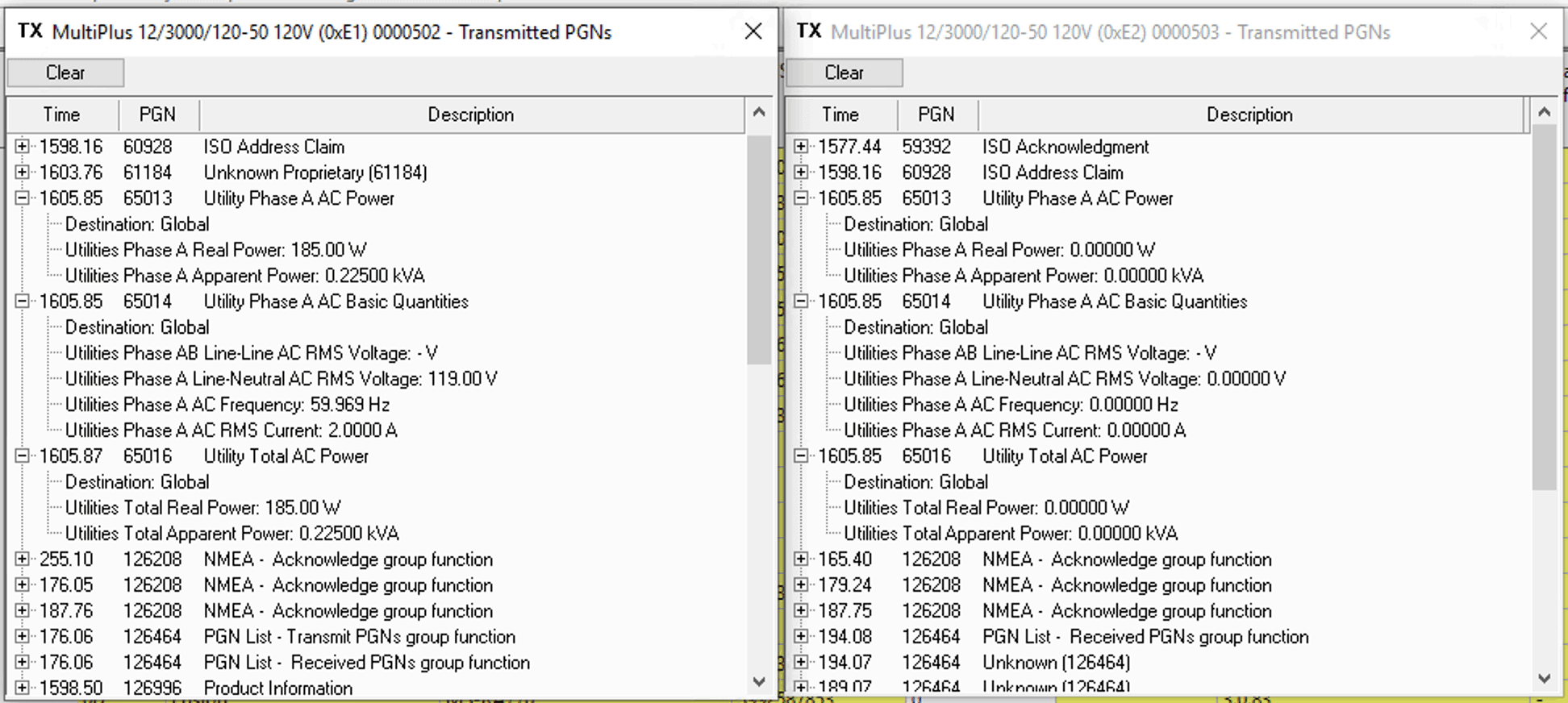
Here’s what they look like when I am on battery power with the inverter running AC loads. The right device is showing zero values, indicating that shore power is gone/off.
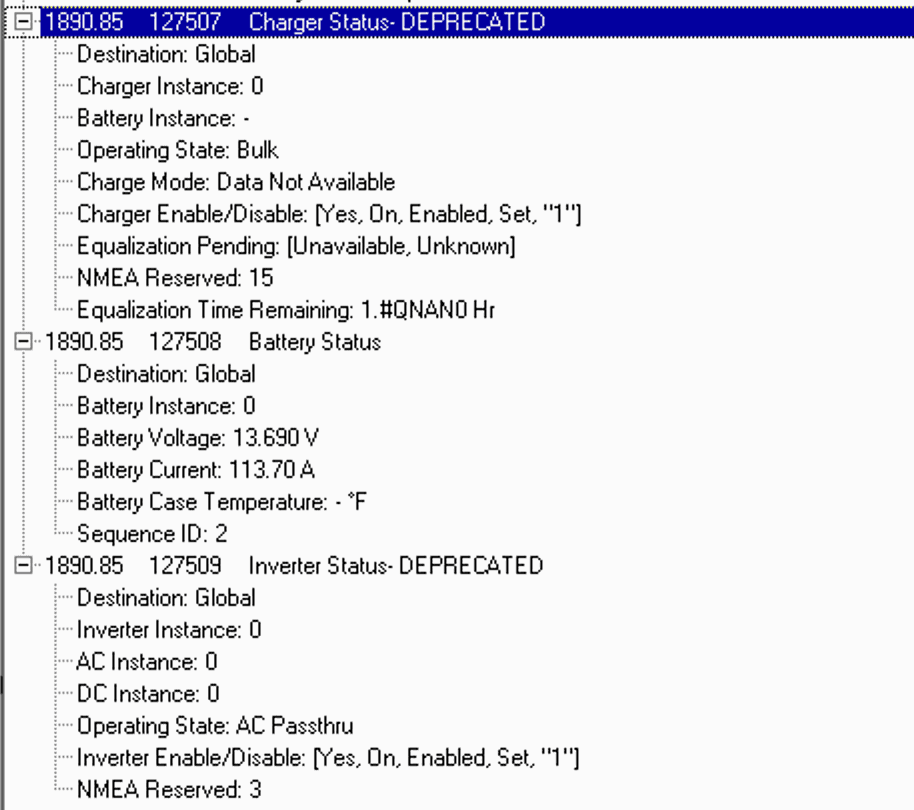
The above shows the left hand device, or 000502, which is the inverter side of things, but the PGNs for charger status, battery status, and inverter status. The charger and inverter status are useful, and pass along to other devices on the network to show the general state.
The battery PGN is good to have too, if you don’t have a BMV or other device monitoring your battery state. Unfortunately, there’s no way I’ve found to configure instance IDs, so this battery status PGN conflicts with the one being sent by the BMV.
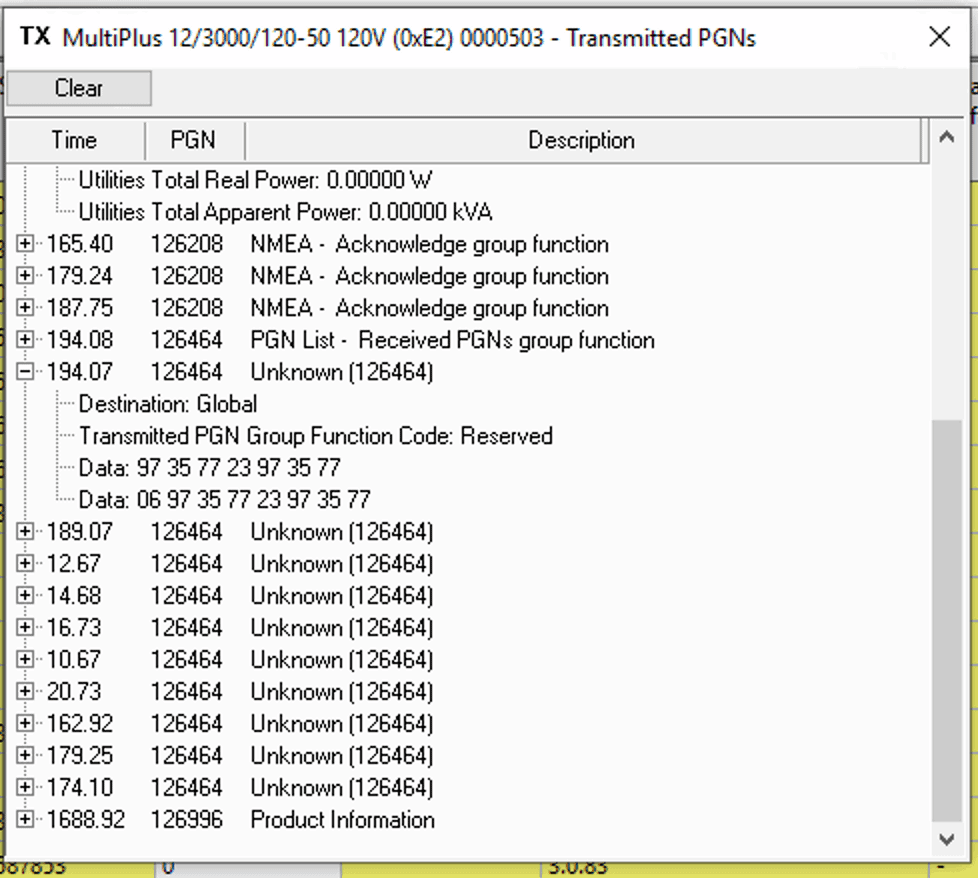
The right hand device also has a bunch of proprietary PGNs which I assume would be used to exchange more detailed info that Victron needs to track, or perhaps control devices via NMEA 2000 that are Victron specific.
Data is good
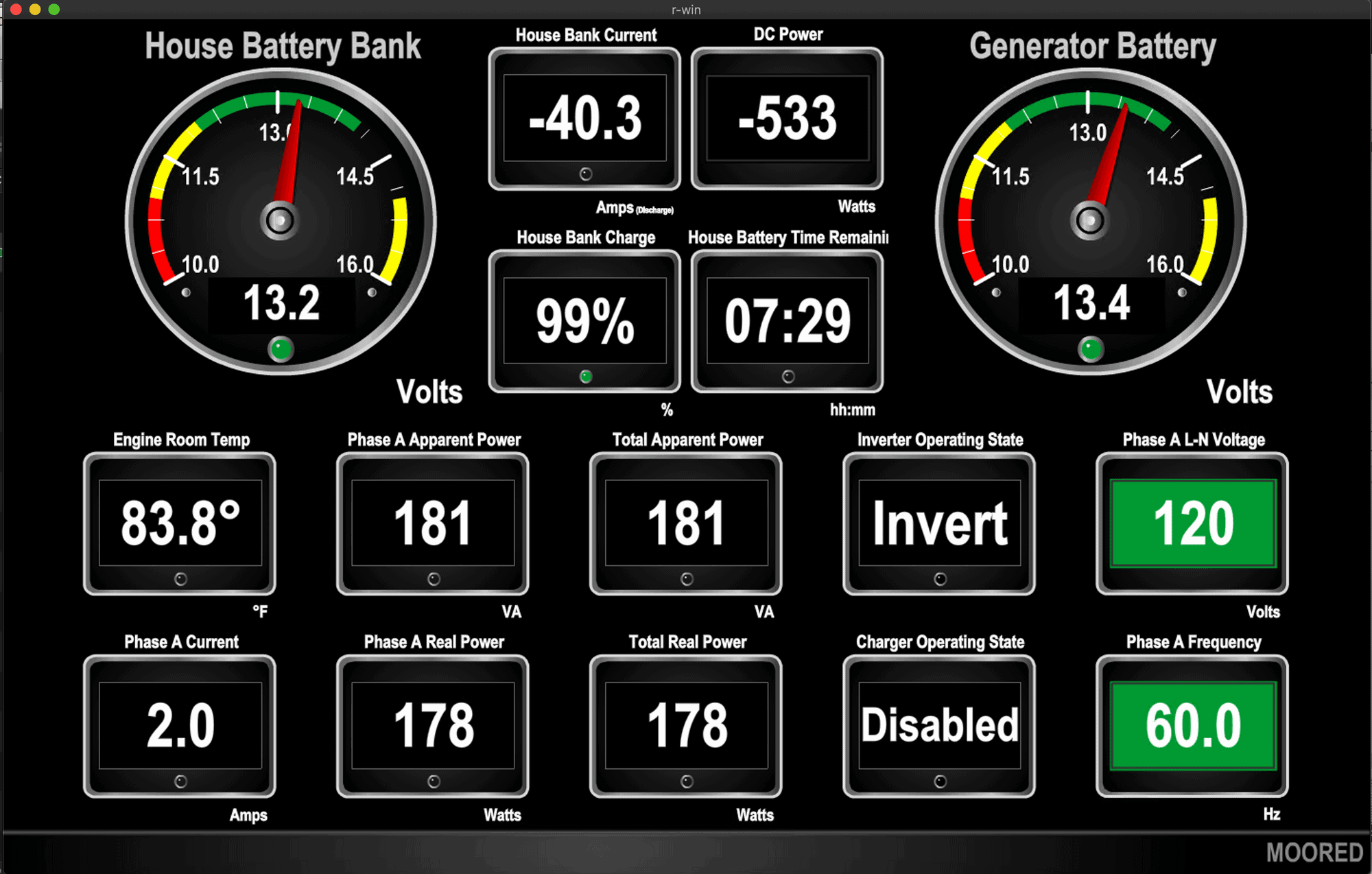
Finally having battery and inverter data on the NMEA 2000 network is wonderful. Being able to see the state of my electrical system on the various Maretron DSM displays around the boat, and especially on the MFDs while underway is very convenient. It gives me clear visibility into what is going on with the system, and I can use the various alarms and alerts to help augment what Victron has. I also like having this data being logged constantly to my Yacht Devices Voyage Recorder so that I can analyze performance and any issues later on.
It took a while for Victron to add this support, but I’m glad it’s finally here.
Archived Comments
These are read only comments from the old system. Scroll down to participate in SeaBits Discussions, our new interactive forum attached to each article.
Greg Davydov
January 4, 2020 at 12:48 pm
Hi Steve,
Do you know how Victron N2K data interfacing with SignalK?
- Steve Mitchell
January 4, 2020 at 10:25 am
I think you’re asking how you can interface Victron N2K data within SignalK? By default, any N2K data will show up in SignalK if you have it configured with an N2K interface. You’ll see all of the various messages there that are on the NMEA 2000 network.
However, if you do not have the NMEA 2000 cable for the GX product, you can use a plugin by Scott Bender to pull the information over the Ethernet/WiFi network directly from the GX product: https://github.com/sbender9/signalk-venus-plugin
I used this plugin for several years before the NMEA 2000 support came out. It pulls a ton more data from the GX product than NMEA 2000 does, but it is only visible in SignalK unless you use another plugin to send it out to other networks, which can get more complicated.
Jurjen Hoekstra
January 7, 2020 at 1:45 pm
Hello Steve, what is the advantage of the Venus GX compared to a setup with a VE-Direct to NMEA2000 converter and a VE-Bus to NMEA2000 converter? Is there now more data available on the NMEA2000 which one can display? I have a set-up with a VE-Direct and VE-Bus converter on my motoryacht Xanthiona and am considering the Venus GX, but do not see yet how it would benefit. I use SeaSmart ethernet module to publish the NMEA2000 data for the purpose of remote monitoring to the HelmSmart cloud service. One thing the service does not distinguish between is the shore power and the output power. See also: http://www.xanthiona.com
- Steve Mitchell
January 7, 2020 at 1:36 pm
You likely see the same (or more) data on your NMEA 2000 network that you would with a Venus GX. So you probably wouldn’t see any more data on your NMEA 2000 network, although it sounds like you don’t see both sides of the AC stuff which you would with the new firmware. The few advantages I can think of are as follows:
First, Victron has said they are deprecating the interfaces you’re using, so there could be new PGNs or firmware updates to products that those interfaces no longer support.
Second, as you cover in your post on your site, is the integration with Victron’s VRM portal that the Venus GX has. This would allow you to control and monitor the electrical system via their portal/apps instead of SeaSmart. I’ve demoed SeaSmart before, and I think you would have more control in general over your Victron components with the VRM than SeaSmart.
Third would be the additional AC data.
Archived Community Comments
These comments were posted on the SeaBits forum before February 2026. Scroll down to join the current discussion.
Thanks so much for this article. I am finally back to work on the Maretron system on MÖBIUS, and I have been at it for several days trying to get the Victron Cerbo to play nice with my N2K network. Your comments in the Victron Community about possibly having a bad cable sent me to considering other troubleshooting issues, and I switched my cable to the other VE can port and voila! Bad cables, bad ports. After that I got the OctoGX online too. But now with 14 MPPT Smart Solar controllers, 3 BVM712s, 5 Multiplus Inverter chargers, I have a huge long list of Instancing issues. Many of these seem to disregard the device instance and data instance which I can change in N2K Analyzer. Is this what you were referring to when you wrote, “Unfortunately, there’s no way I’ve found to configure instance IDs, so this battery status PGN conflicts with the one being sent by the BMV.” I have lots of conflicting battery status instances, and yet when I try to create an element on in screen in N2KView, it doesn’t find anything. Any suggestions as to how to make this mess work?
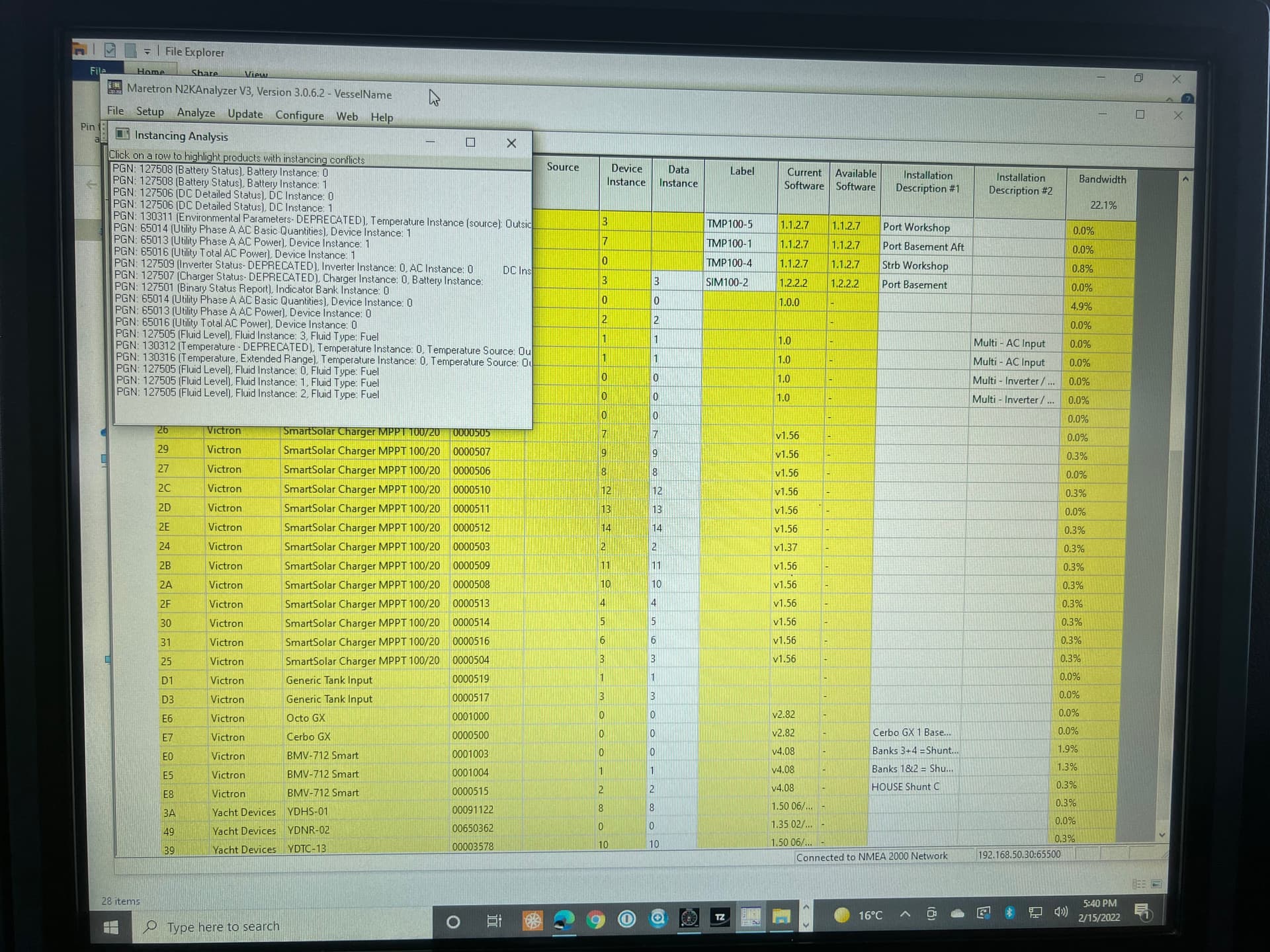
You’ve found one of the achilles heels of how Victron implemented things. My last boat had three conflicting battery PGNs on the N2K network from their equipment, and using N2KView from Maretron was almost impossible as a result. Several other folks I know are struggling with this same challenge.
I would urge you to open conversations with Victron, as many of us have, and see if they will consider fixing their broken implementation, or at least honoring the way it works through instancing so we could use things.
I’m building my new system on Kaos and will have 6 shunts, 2 inverters, a passel of DC-DC chargers, and a handful of solar controllers, and I expect they will all dump the wrong info onto the network as well.
I know one way I was able to get around this was to use SignalK to grab the Victron data directly from the GX product and put it on the N2K network in a more organized fashion. I need to revisit how I did this and will be doing so shortly.
Thank you so much for this reply. I’ve been looking at this for days and trying to understand what was going on. There are several things that cause our system design to be overly complicated, but these are not unheard of circumstances for today’s vessels. First, we wanted to be a “world boat,” so we while we are basically 240V, we also have 110V. Victron does not recommend attaching two strings of different Multiplus inverters to the same GX device, hence we have both a Cerbo (for 240V) and an Octo GX (for 110V) on our network. Then we have our twenty-four 4V Firefly batteries divided into four subgroups of 6 batteries each. We have 3 BMVs - One for group 1 + 2 which we call bank 1 and the other for bank 2, and the third for both banks combined or our total House Battery capacity. And then we have 14 individual MPPT controllers for each of our solar panels connected to the Cerbo. Thus, can you imagine how many devices were sending out Battery status PGN’s?
This meant when we accessed the VRM, we had two installations, one for the Cerbo and one for the Octo, and everything was neatly separated. We had to switch from one to other to get the whole picture, but that was fine.
What surprised me most was how much information the Victron devices took back off the network when I connected them to N2K. While we were not using the tank or temperature connections on the Cerbo, once connected to N2K, suddenly some of our Maretron tank and temperature sensors appeared as Victron connections in the VRM. Both the Octo and the Cerbo suddenly showed not three, but six BMV’s. I knew this was all related to the instancing, so I tried to find info on Victron’s site.
The two main places I found info was in their section on MFD integration and here on Changing N2K Instances. I am loath to follow any of these instructions for changing instances, since they start off with a warning that they advise you NOT to do this or you might inhibit the Victron devices from talking to each other.
I really appreciate all the information you share on your site, and I will definitely take you up on a couple of your suggestions here. I will both contact Victron about this, and I will start tinkering with the Raspberry Pi we bought recently so perhaps we can use that as a method to sort all this out. Fortunately, you have blogs to teach me about the Pi and SignalK, so I will have plenty to keep me busy while waiting for your SignalK/Victron post.
I’ve seen all of these issues as well unfortunately. The tank thing is particularly irritating.
As I mentioned, I’ve considered not connecting the Victron equipment to my existing NMEA 2000 network and just using SignalK to connect via TCP / ethernet. It could then put specific info back on NMEA 2000 so that N2Kview could process it and alert on it, or alternatively, use other parts of SignalK, Grafana, or the like to provide alerting and monitoring.
There are still some limitations in that approach, but I haven’t found them all yet. Hopefully in the next month that will happen as components are installed and shipments arrive!