

Raymarine continues to release updates to Lighthouse 3 on a fairly aggressive schedule. The latest is version 3.2 which includes support for three things I was very interested in – Navionics dock-to-dock autorouting, Fusion audio support, and upgrading other Raymarine devices. The update was released in late September 2017 and I have been using it for a bit over a month with a few issues.
In addition to the features above, the release includes a bunch of updates to sonar features, wireless streaming of Axiom to a TV or other device, C-MAP integration (which might be more important with the purchase of Navionics by Garmin) and more advanced map options. You can find out more details on all features on Raymarine’s support site.
Make sure to check out my review of the Raymarine Axiom chart plotter and Lighthouse 3.0 for more in depth pictures on the Lighthouse and Axiom initial release, Raymarine Lighthouse 3.1 – autopilot goodness, Lighthouse 3.3 – AIS and radar updates, and the latest on v3.4 with apps like Netflix, Spotify, bluetooth support and more
Lighthouse 3.2 showing wind speed/direction and travel
It’s good to see features coming back to the 3.x series that we had in 2.x. Above you can see a yellow teardrop showing the direction that the wind is coming from, as well as the speed in knots. There’s also a matching arrow further along showing the direction of boat travel and speed (I’m sitting still). This feature existed in a slightly different way in 2.x – I like how clear the data is in 3.x. Clicking and holding on your boat icon will allow you to change what overlays show up.
Navionics Autorouting
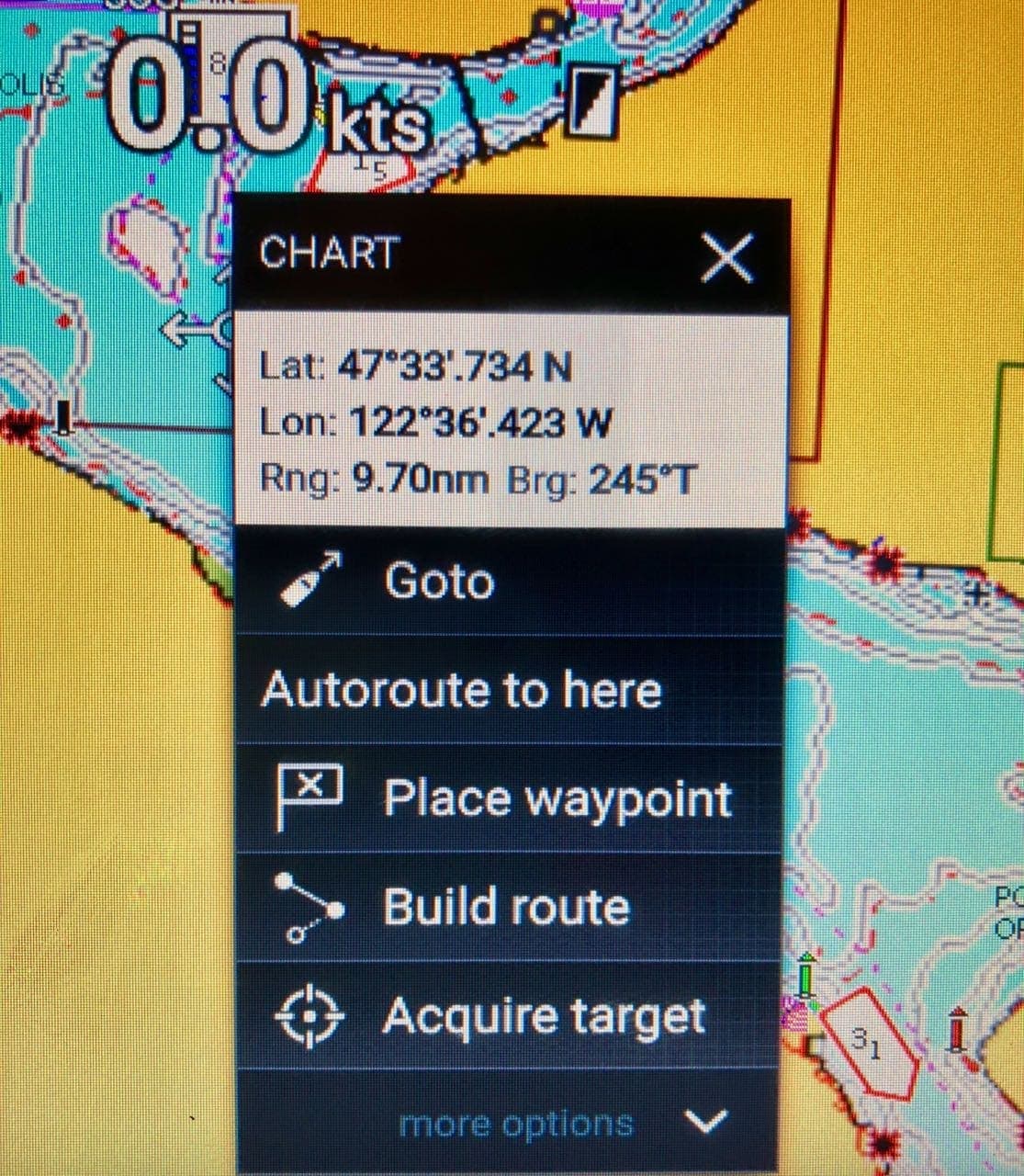
Starting an autoroute course
Navionics dock-to-dock autorouting is back, which makes me very happy. For shorter day trips, I have come to rely on this feature for quickly routing us to a particular destination depending on where we are at the time. To start a route, you click on your destination on the map, and choose “Autoroute to here”.
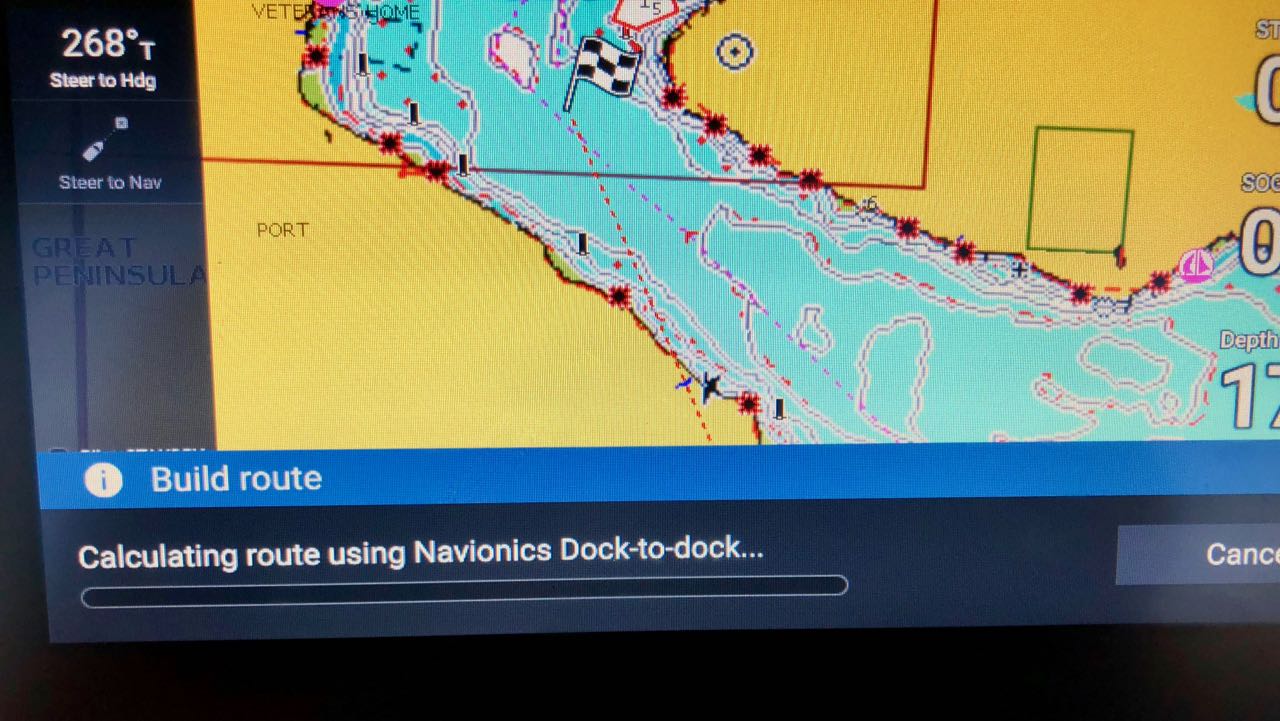
Autoroute building a route
Make sure you have your boat properties setup correctly so that autoroute is aware of minimum depth, beam, and height. Once you have the destination chosen, Navionics will start building the route. I’ve noticed that it is more sensitive than I remember 2.x being, and won’t create a fully auto routed course. I think it might have something to do with the minimum depths having been updated, or the logic that is used in the new version for determining minimum safety.
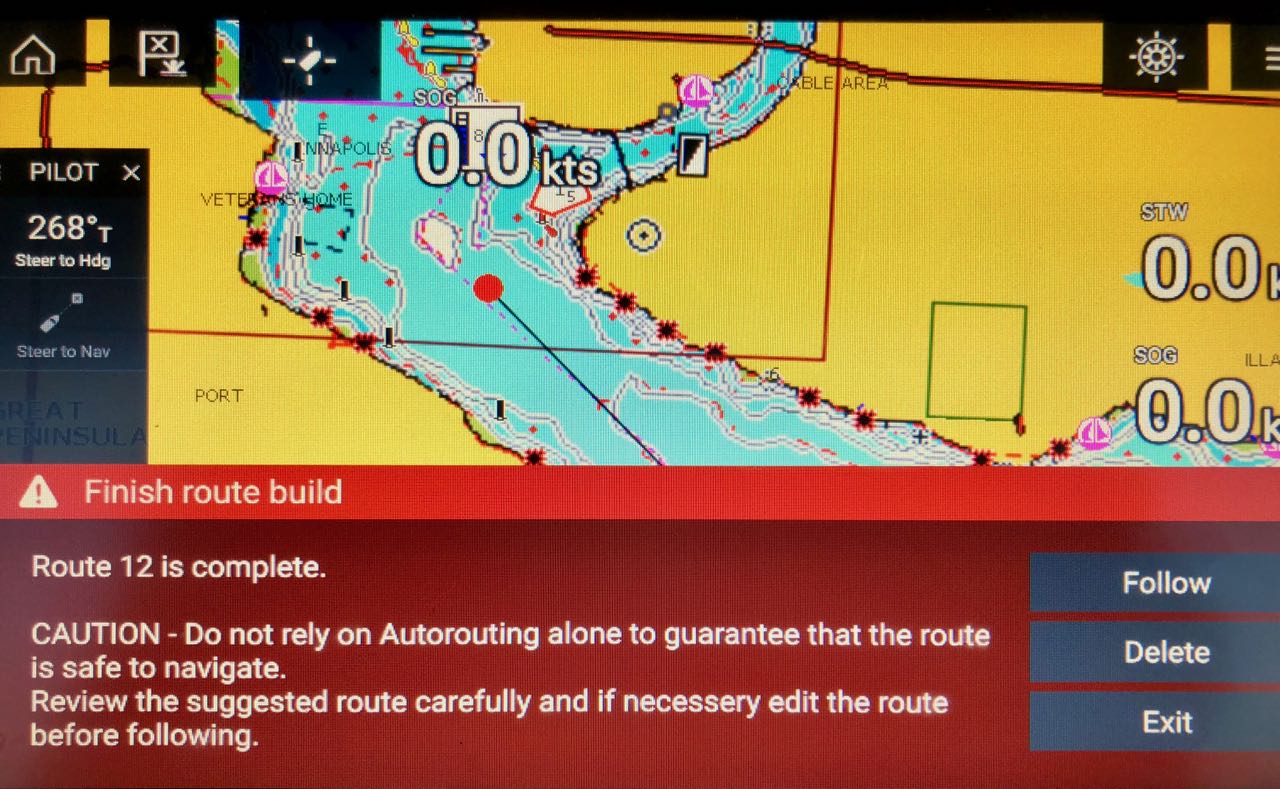
Finished route
One the route is completed, you have the same options as before to simply follow the route, or to edit in first. There’s a lot more red warnings in 3.2 than I remember in 2.x.
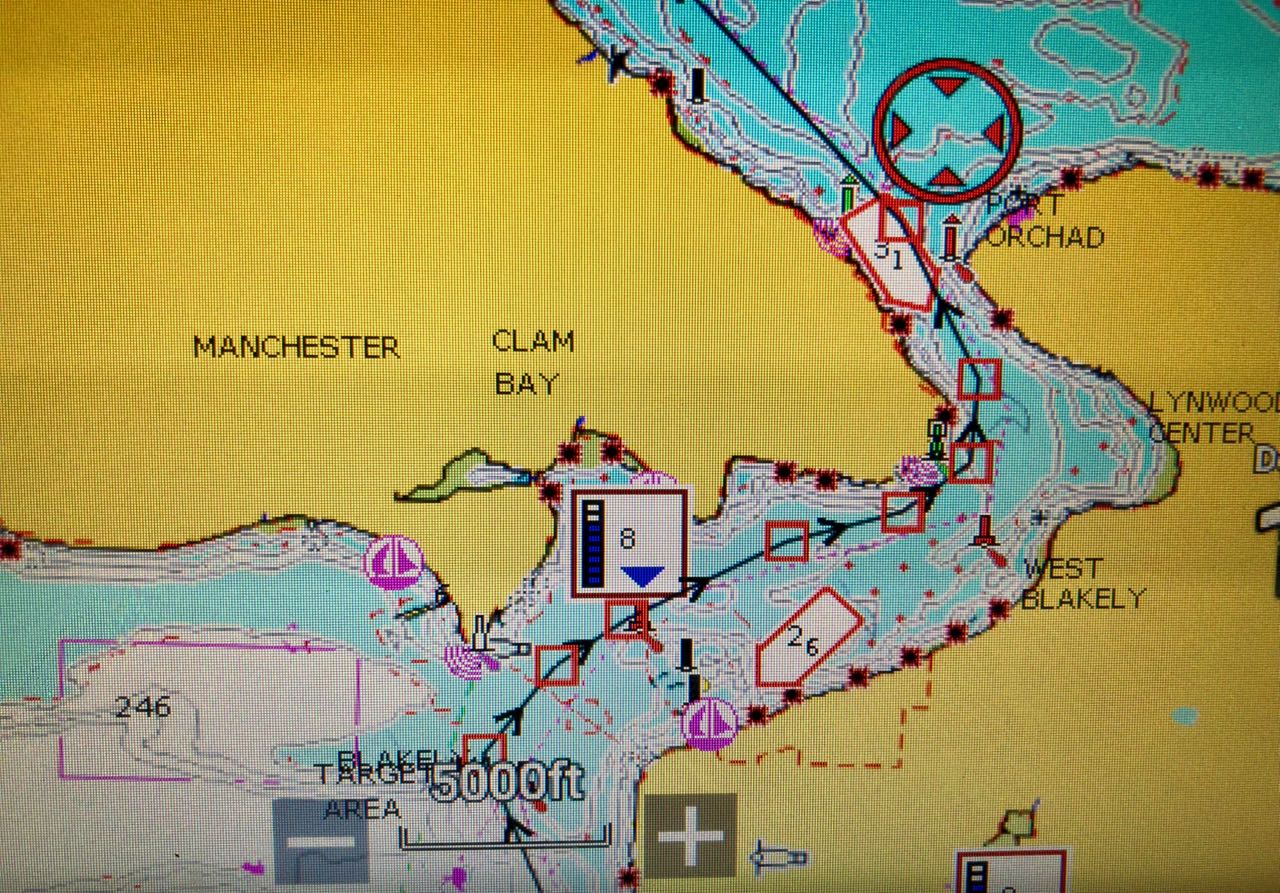
Completed auto route
The automatically created route appears to work just like a normal route, and worked with my testing just fine. I’m glad to have autorouting back again, but look forward to all of the other Navionics features from 2x – like plotter sync (the ability to build a route on an iPad and send to the MFD, or vise versa) and the ability to update my Navionics subscription from the MFD. Since my Axiom has the SD card in the back of the unit, and it is mounted in a NavPod, updating the card requires a 20 minute uninstall process to get to the card, and then manually update in a computer. Both of these features are scheduled to come out very soon according to Raymarine’s FAQ page.
Fusion Audio Support
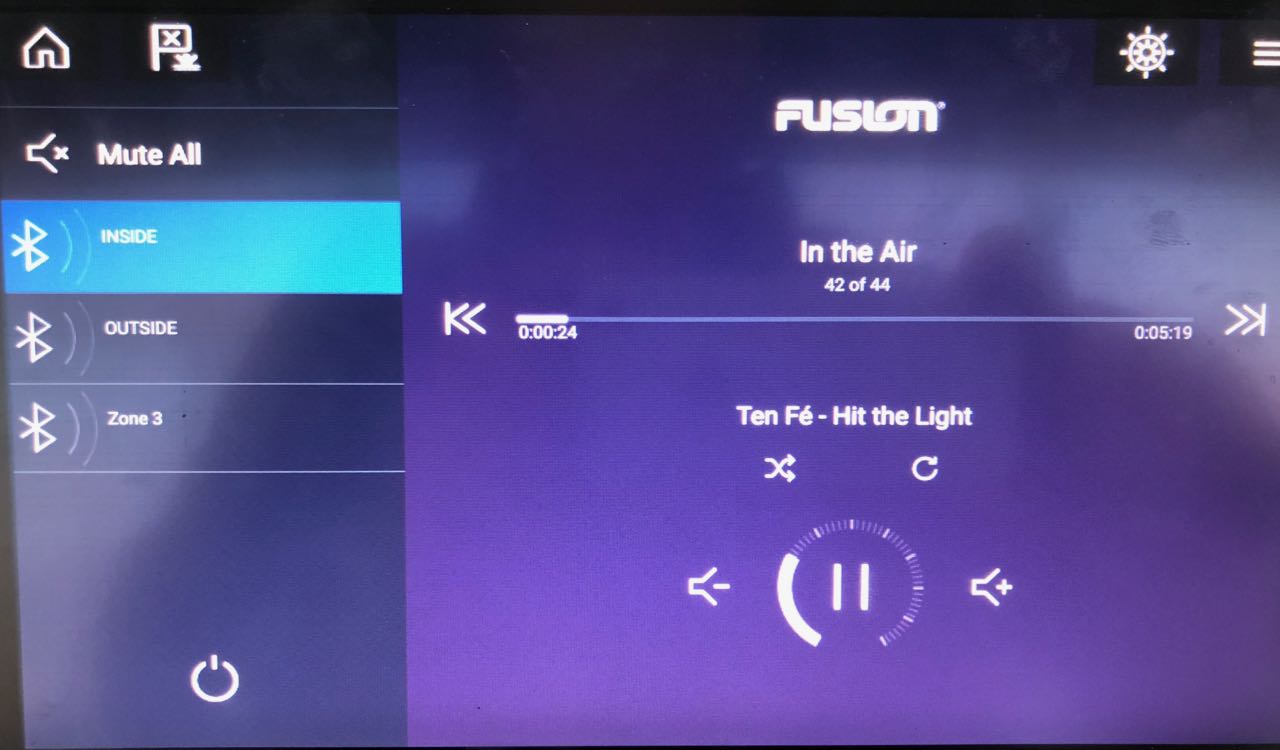
Fusion audio control
Fusion audio control is also back in 3.x and looks pretty good. Control in 2.x always seemed a bit clunky with sub menus and weird clicks required to change multi-zone volumes. We used it on Grace constantly to control the music around the boat, and people had to learn the quirks to use it, which is never a good sign. This version has a lot more information presented in a much, much easier way to see and interact with. Above you can see the three zones on the left, and the song details and volume control on the right. I am playing a song from a Bluetooth connected iPhone running Spotify, which sends along song names and details.
You can even change whether to play normally, shuffle, and quickly scan through a song, all things that were very difficult if not impossible to do in 2.x. The icons are very straightforwards, and everything is easy to understand and use. I was not able to setup any overlays on chart pages because of the instability I cover below. I hope this is an option or on the roadmap. Having to switch to a separate screen, or to give up 1/2 or 1/4 of my screen to a dedicated panel for the radio is inconvenient. I would like an overlay item on the chart/radar screen just like every other manufacturer has.
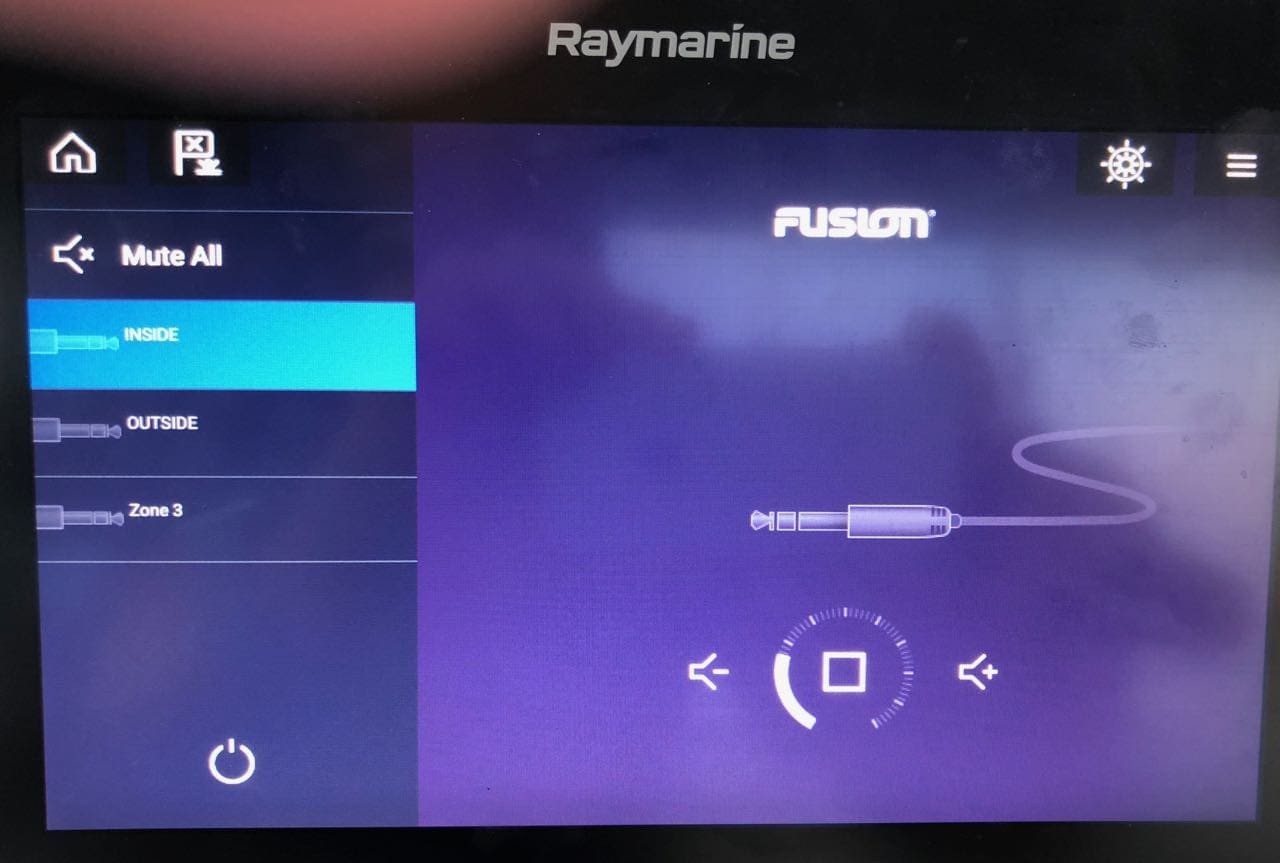
Aux in control
Most of the time, we use our Amazon Echo to control the music, and both connected via the AUX in or via Bluetooth, it doesn’t share the song information. Still, you can control the volume in the different zones, and simply yell at her to change the song if desired.
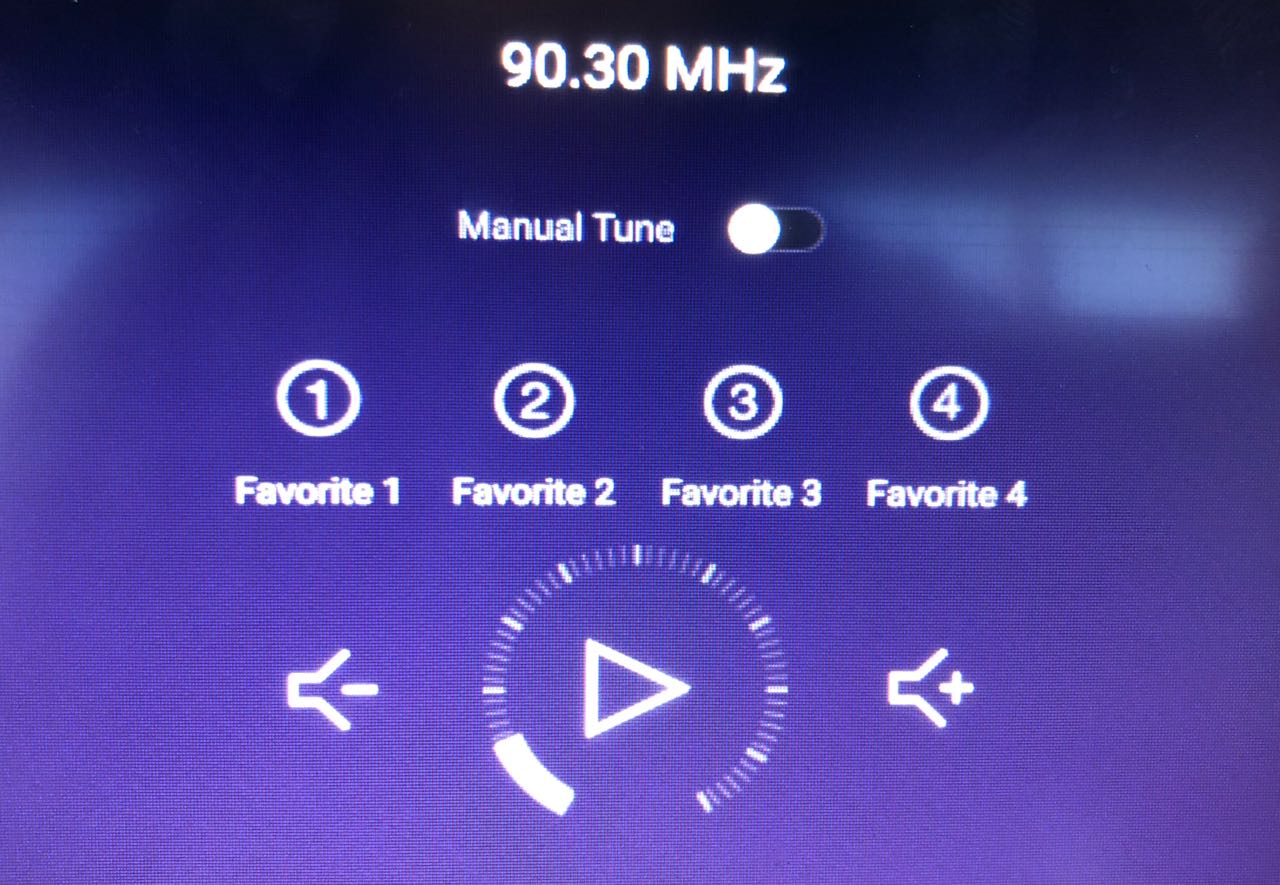
Radio station favorites
Radio station favorites can be saved and recalled from the interface as well.
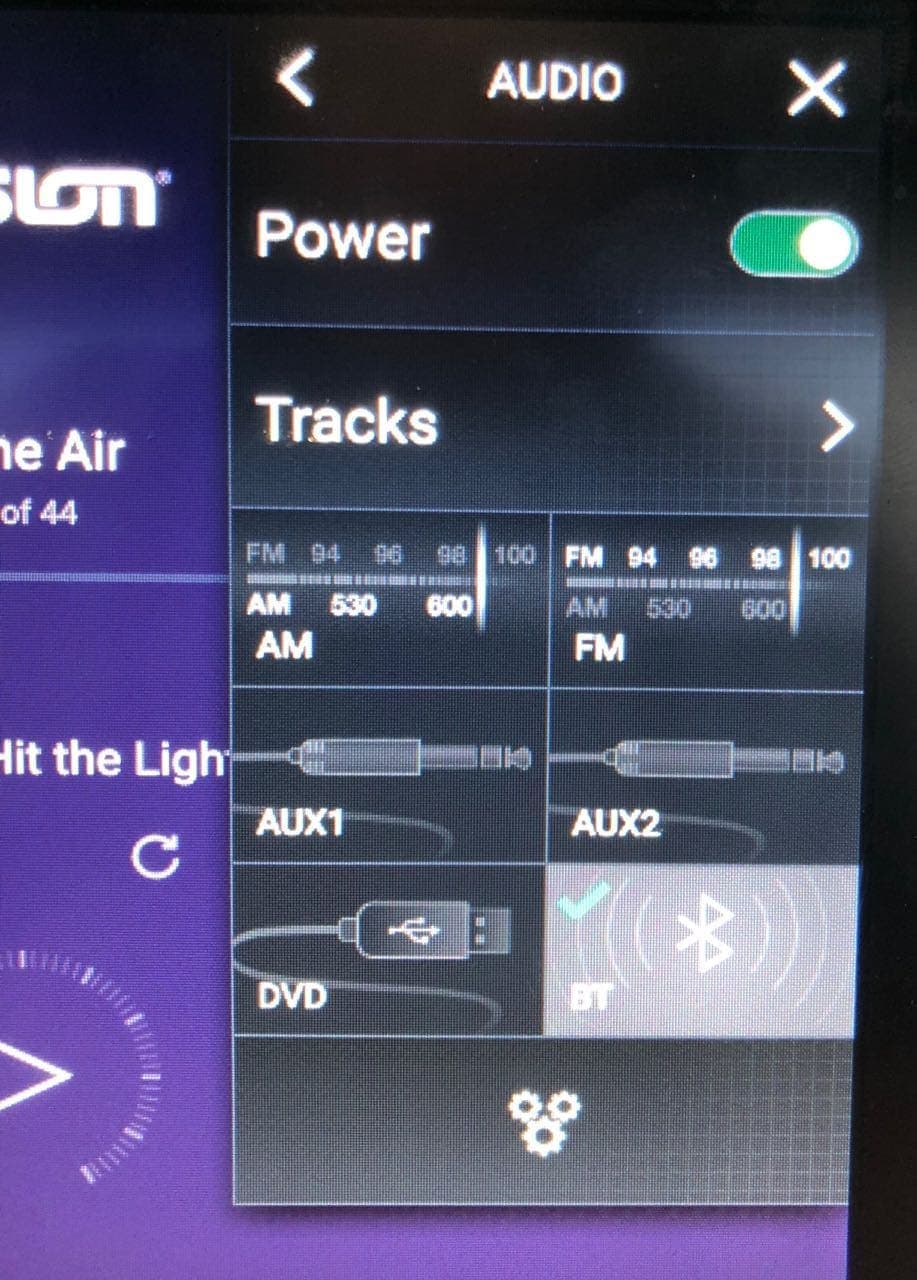
Fusion input choices
Choosing an input is much easier as well, with nice icons associated with each one. The theme for 3.x continues in 3.2 of having much more thought out UI/UX experience, and making how you interact with the boat and the product much simpler and clearer.
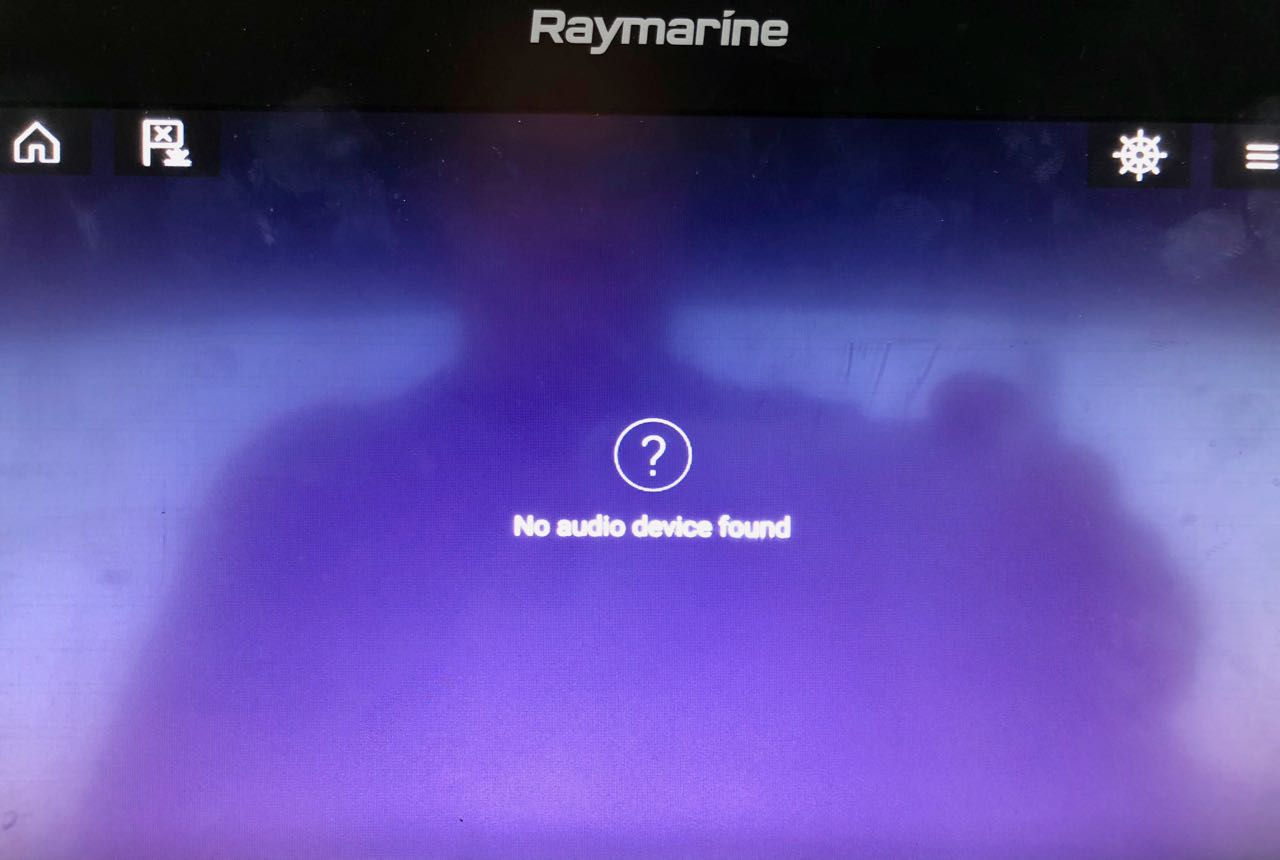
Still not reliable
However, even with all of these improvements, I have yet to get my Fusion radio to work more than a few minutes before my Axiom can no longer find it. I’ve tried isolating the devices, checking the NMEA 2000 network, doing debug logs, and more, but everything points to the Axiom / Lighthouse 3.2 being the problem. I posted in the Raymarine forums, and it sounds like they are aware and should have a fix, but it is disappointing having waited 6 months for the support to be re-added, only to have it not work. B&G/Simrad has had it working for 4+ years (or maybe longer) and even on their older software was as functional as what Raymarine is doing now.
Wireless Display
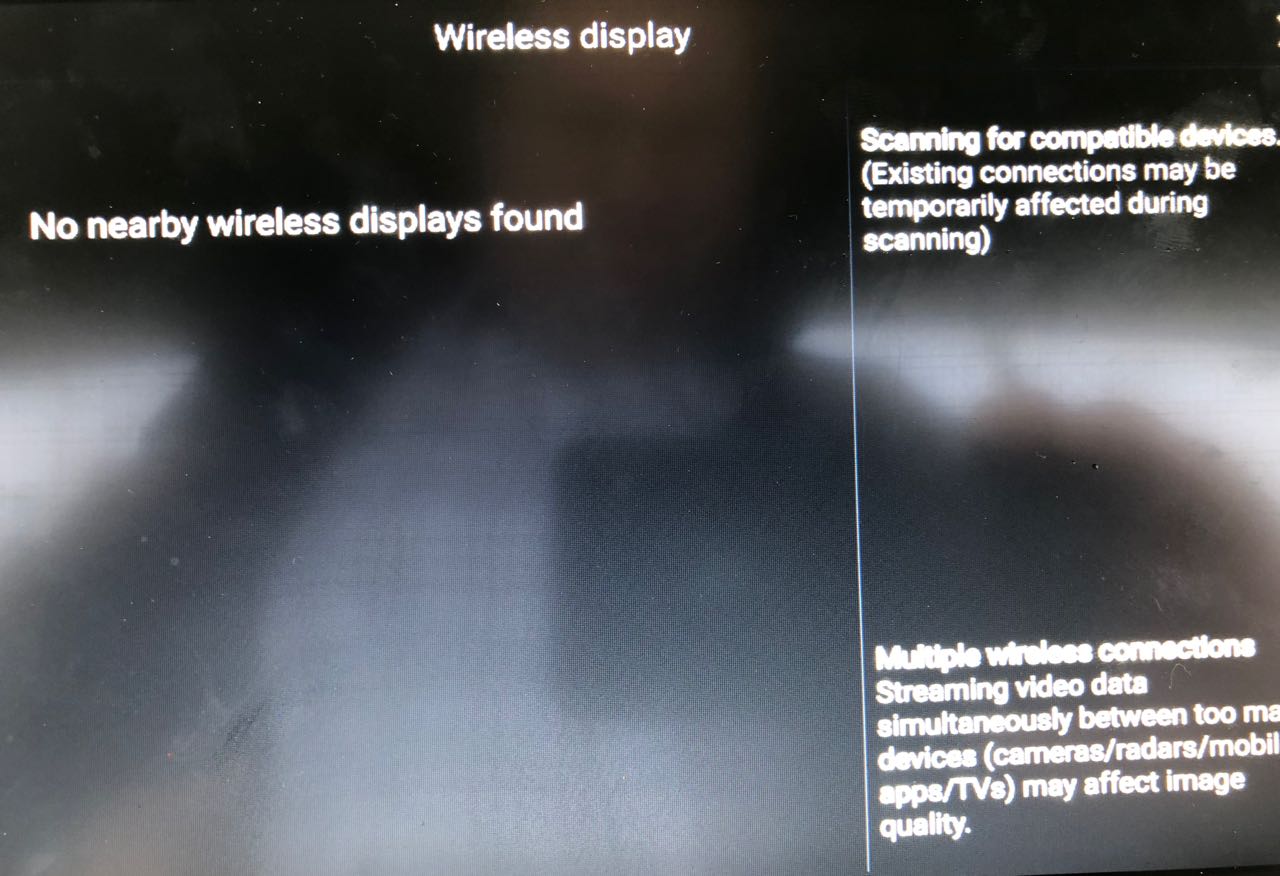
Wireless display setup
I was very excited about this feature, which I envisioned using to show the MFD display on the salon TV when we are at anchor or otherwise not moving. Unfortunately after testing it with various devices including the native casting in my Vizio TV (not Miracast supported), a Roku which does support Miracast, and several other iterations of random devices I had lying around, I could not get the MFD to see the cast devices on the network. I am waiting for an answer from Raymarine on this.
Software Upgrades
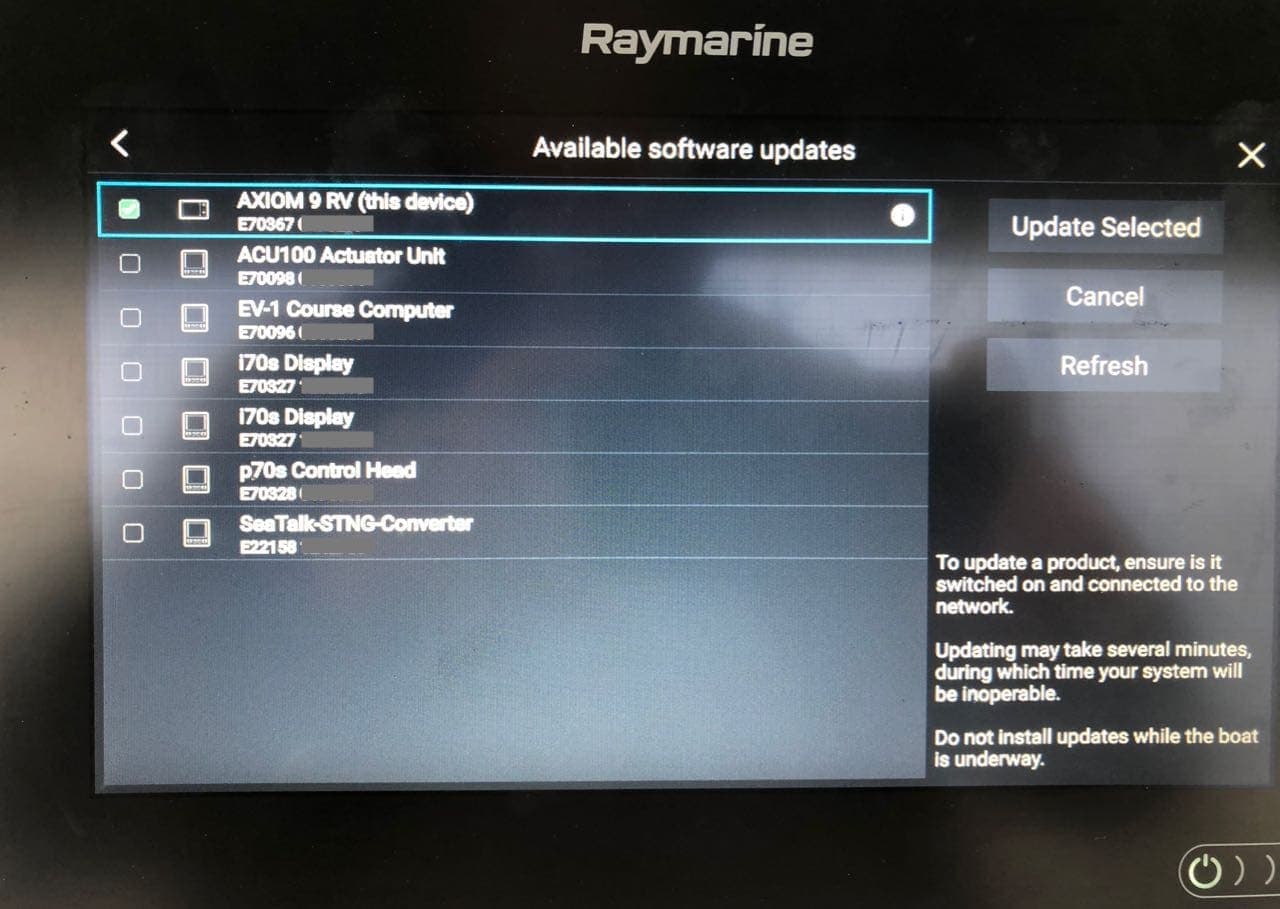
Software updates for all Raymarine devices
It is great to have the ability back to update your software on other Raymarine devices from the MFD. I have i70 displays, SeaTalk to NMEA 2000 bridge, and the whole Evolution Autopilot system (3 components) which all require updates at one point or another. Now I can do that again from the MFD, and it allows a bit more granular control than 2.x.

Bugfix upgrade?
While I was taking some screen shots of this new interface, I was shown there was an update to v3.2. I had installed the initial release which was 3.2.97, and a new version, 3.2.101, was being offered. Unfortunately instead of an incremental update, I was faced downloading a 688MB file which I didn’t have time to wait for. Raymarine should learn from Google, Apple, and everyone else that incremental updates between build numbers should be smaller files – not the entire OS as it appears above. Boats have less bandwidth than most places, and this just adds insult to injury. I’ve already downloaded the new version and will be testing it shortly.
Update: I was notified by Raymarine that the 3.2.101 version fixed a number of WiFi issues, potentially including the issues I have been having with my Quantum radar. I have updated to the new version, but still see instability with the radar. I will post here if that changes.
More good stuff, still bugs
3.2 is a decent update, mostly feature parity work with 2.x, which is good to see, along with a few new items. However there are still significant stability issues with many 3.x features – I am still plagued by a completely unreliable Quantum radar, a radio I can’t control, and random reboots and issues. While it’s great to see features coming back, it would have been better to see stable, core features at release, and new innovative features coming out now. Hopefully that will happen in the next few months as the final parity work is completed, and v3.3 is released on older MFD hardware.